情景任务:
瓦力工程师接到一个新任务,就是设计出一套智能避障装置,然后研发出智能避障机器人,来装备到一家大型的综合餐厅,能给每位顾客送饭。

知识点拓展:
红外避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。
超声波其实就是声波的一种,因为频率高于20kHz,所以人耳听不见,并且指向性更强。
超声波测距的原理比红外线更加简单,因为声波遇到障碍物会反射,而声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离,如下图所示。
超声波测距相比红外测距,价格更加便宜,相应的感应速度和精度也逊色一些。同样,由于需要主动发射声波,所以对于太远的障碍物,精度也会随着声波的衰减而降低,此外,对于海绵等吸收声波的物体或者在大风干扰的情况下,超声波将无法工作。
任务分解:
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、停止、转弯、后退的控制方法
5.需要有避障系统。
器材分解:
电池盒、轮子、CPU、触碰开光、LED灯、红外避障传感器。
学习目标:
1.了解避障机器人工作原理
2.了解红外避障传感器的工作原理
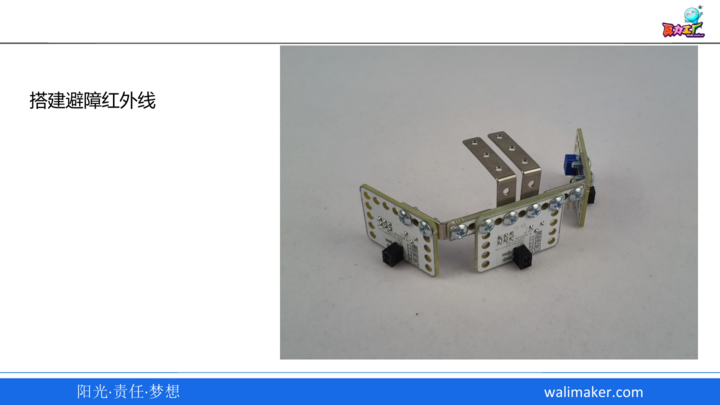
3.搭建标准避障小车。
构建步骤:



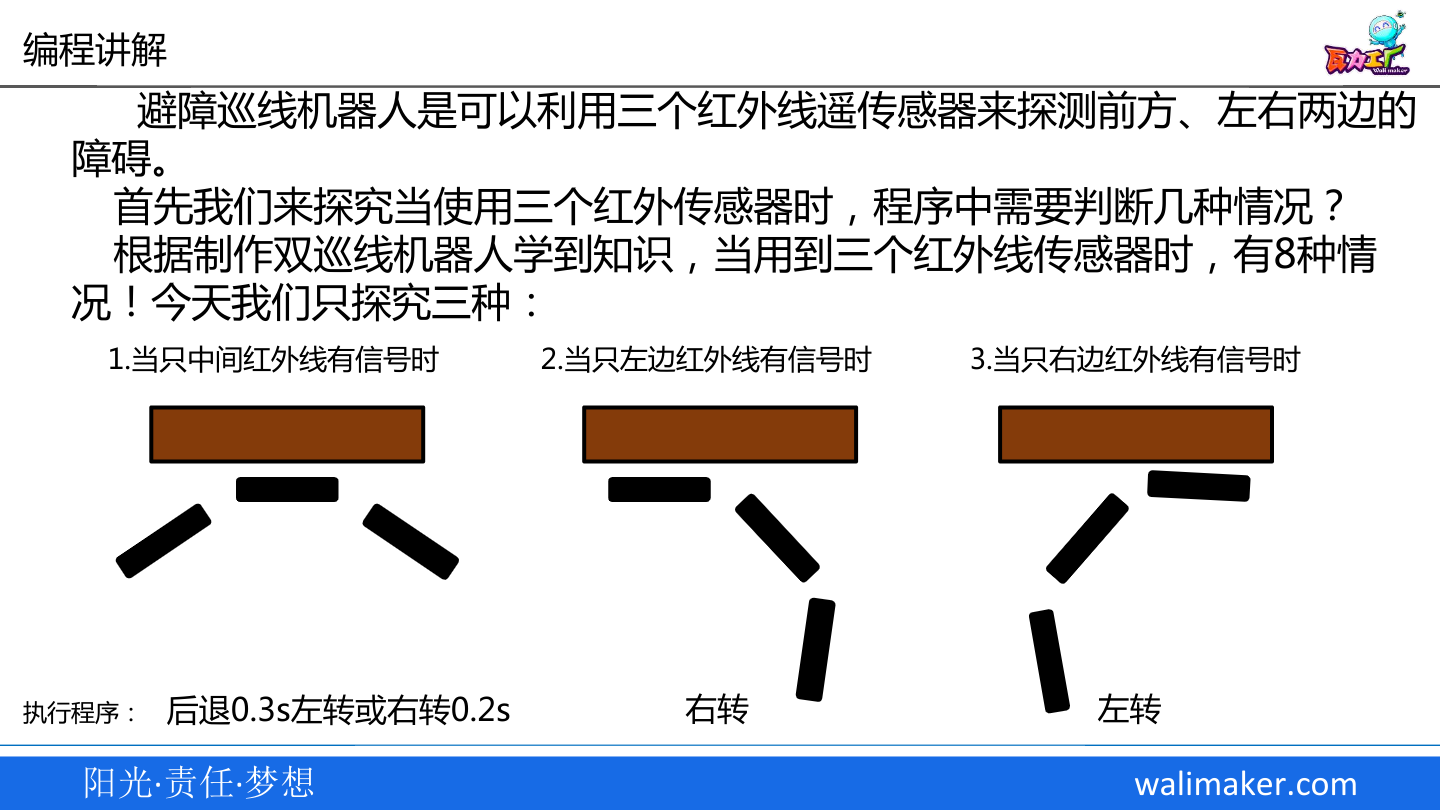
避障机器人程序设计:

避障机器人完成了,有什么疑问,加老师微信进行咨询吧!