情景任务:
双11刚刚过去,瓦力工厂就接到一个任务,那就是为明年的双11设计自动送快递的小车,因为双11实在是太火爆了,快递员夜以继日的送快递都不能把快递送完,有的快递员都累病了。这个任务就交到了我们伟大的瓦力工程师手里,对于这样的问题,我们瓦力工程师只能说NO Problem!

知识点拓展:
红外避障传感器基本原理:
利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。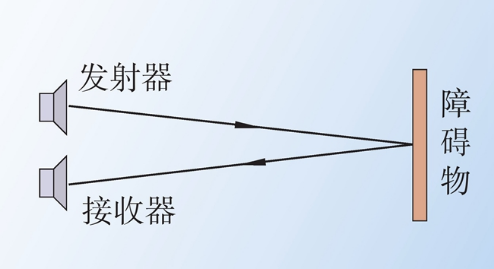
巡线机器人的实现原理
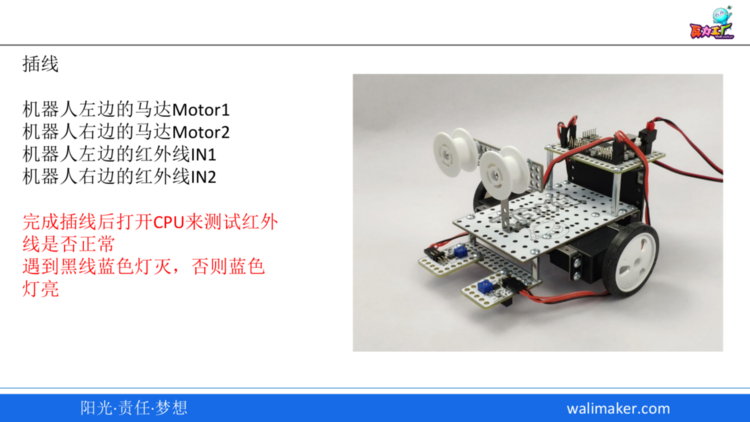
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常亮。
任务分解:
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、转弯、停止的控制方法(不能手动)
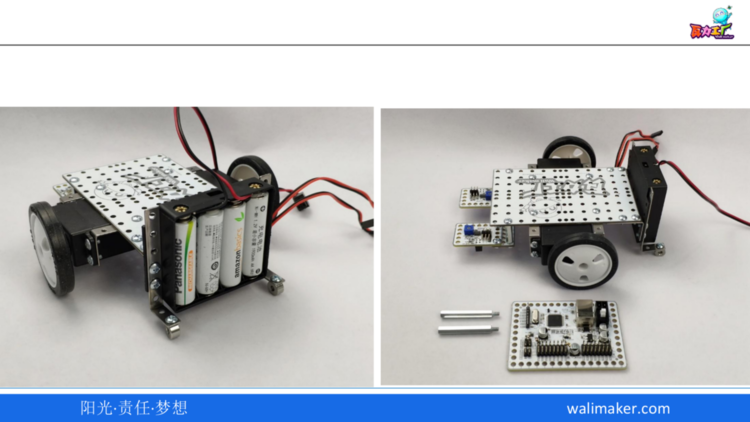
器材分解:
电池盒、马达、轮子、CPU、红外避障传感器、附件
学习目标:
课程目标:
1.了解双巡线。
2.红外传感器搭建与调试。
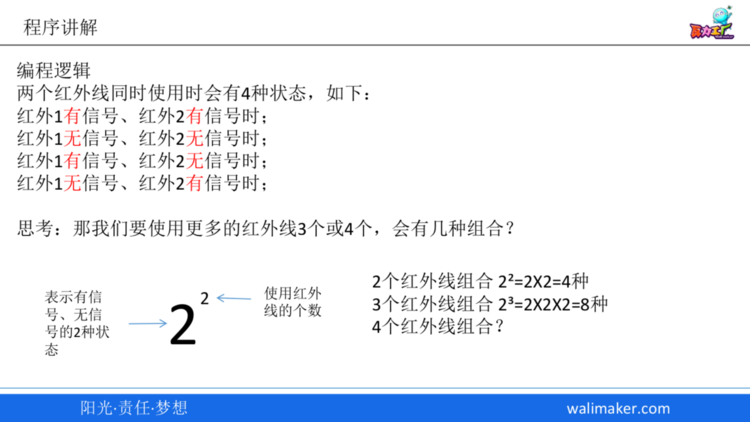
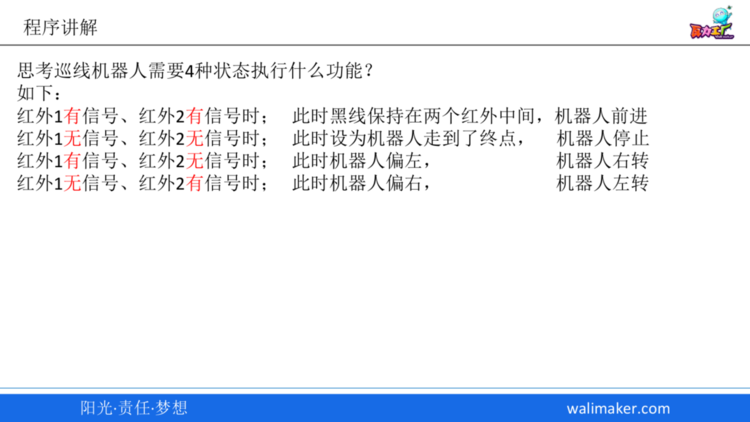
3.双红外线巡线编程逻辑。
4.培养孩子发现问题,分析问题,解决问题,动手搭建能力。
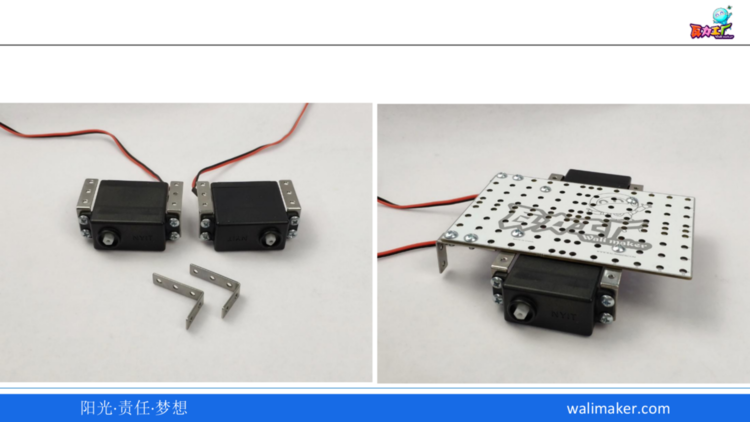
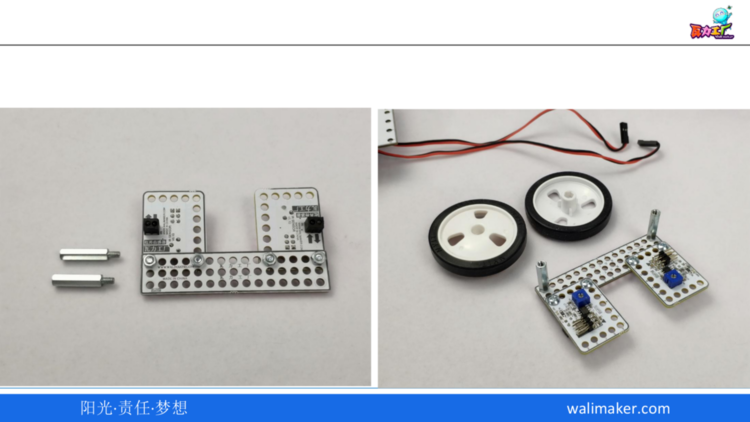
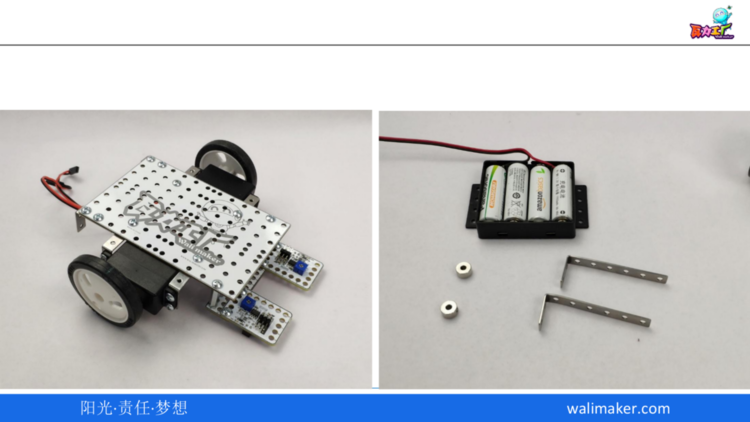
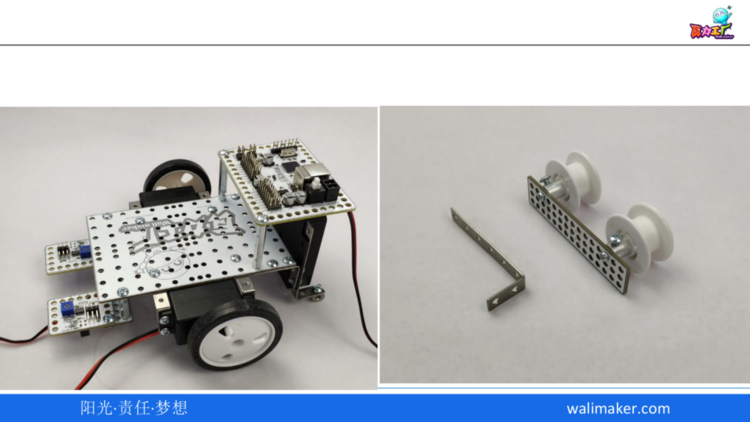
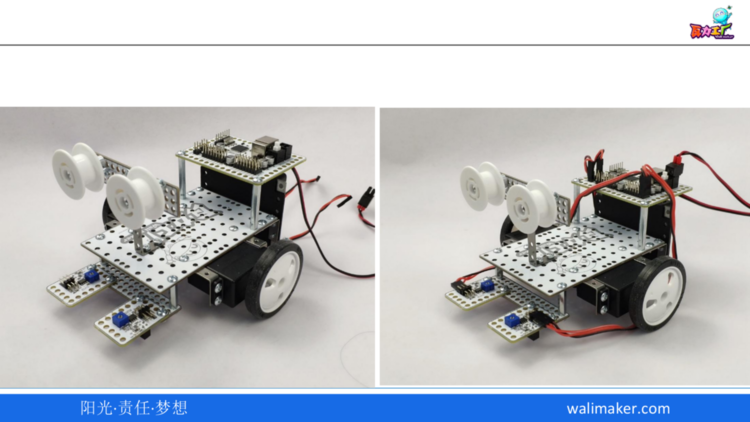
构建步骤:
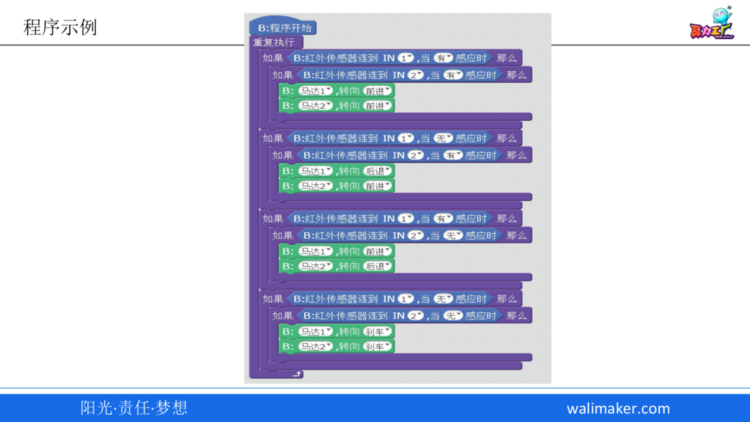
接力赛机器人程序设计:

双巡线机器人已完成,有什么疑问,加老师微信进行咨询吧!