情景任务:
武器装备部要求瓦力工厂制造一种仿生鱼,用于侦测水下敌方的潜艇,瓦力工厂把这个光荣的任务交给我们瓦力工程师,为了保家卫国,维护世界的和平,我们瓦力工程师流点汗,加点班也没什么。技术在手,什么都有,NO Problem!
知识点拓展:
鱼身体呈流线型中间大两头小,身体表面覆盖鳞片,保护身体;鳞片表面有一层粘液,游泳时减小水的阻力;身体两侧有一行侧线,侧线和神经相连,主要是测定方向和感知水流的作用;鱼的身体长有胸鳍、背鳍、腹鳍和尾鳍是鱼在水中的运动器官;体内有鳔,主要作用是调节身体的比重,鳔在鳍的协同下,可以使鱼停留在不同的水层里。
鱼鳍的作用:背鳍和臀鳍主要在行动时起稳定作用和平衡作用。尾鳍和体侧肌肉配合,起推动鱼体和掌握方向的作用。胸鳍和腹鳍的主要作用是保持鱼体平衡,配合鱼体转向,调整鱼体升降。但胸鳍比腹鳍用途更广,可以像船桨一样,一下一下地划动,使鱼体徐徐前进。

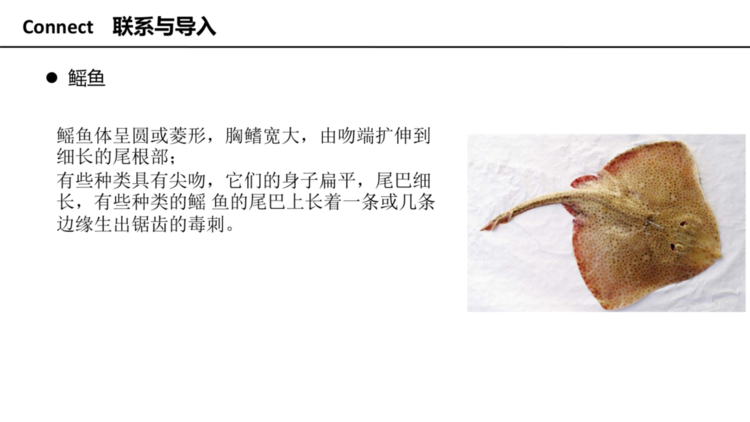
鳐鱼,属于软骨鱼纲鳐形目 Rajiformes和鲼形鱼目,是多种扁体软骨鱼的统称。分布于全世界大部分水区,从包括2亚目,共8科约49属315种。中国产6科8属28种。我国各地俗称不一,舟山渔民称黄貂鳐叫黄虎,称蝠鲼叫燕子花鱼、黑虎、双头花鱼,称何氏鳐叫猫猫花鱼,而胶东渔民则叫劳子鱼、老板鱼。鳐鱼体型大小各异,小鳐成体仅50厘米,大鳐可长达8米。鳐鱼无害,底栖,常常部分埋于水底沙中。
任务分解:
1.需要外界能量提供动力
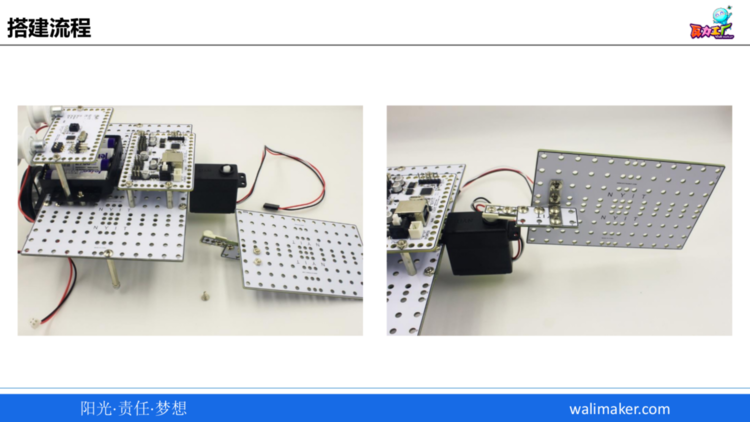
2.需要有伺服马达控制鱼尾游动。
3.需要控制伺服马达的指令。
器材分解:
电池盒、马达、伺服马达、CPU、触碰开关、附件
学习目标:
1.伺服马达的认识与应用.
2.伺服马达的多功能用途.
3.遥控器控制双马达分开编程。
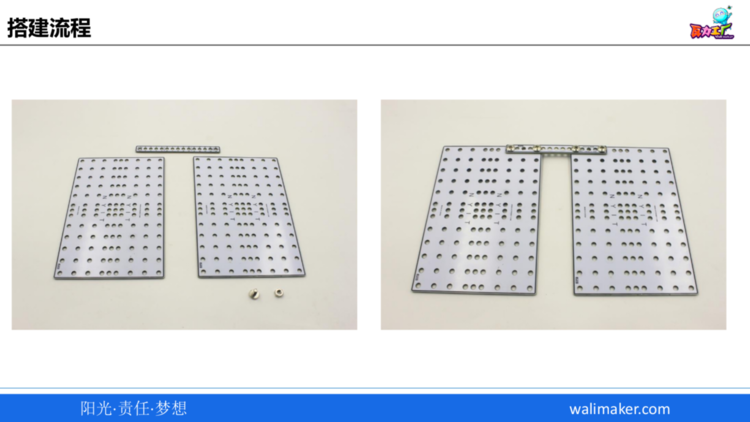
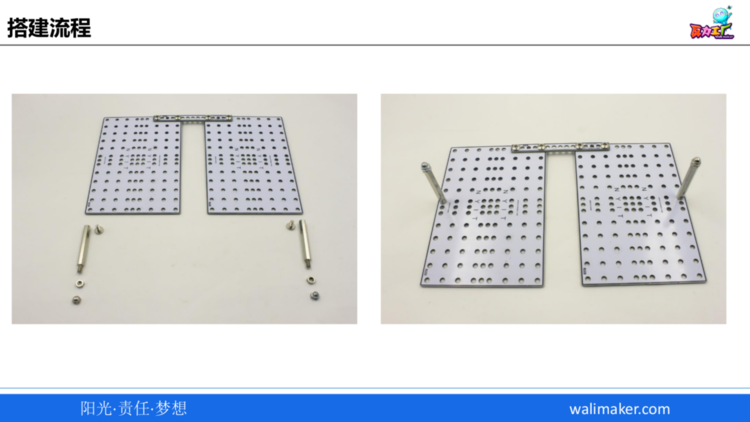
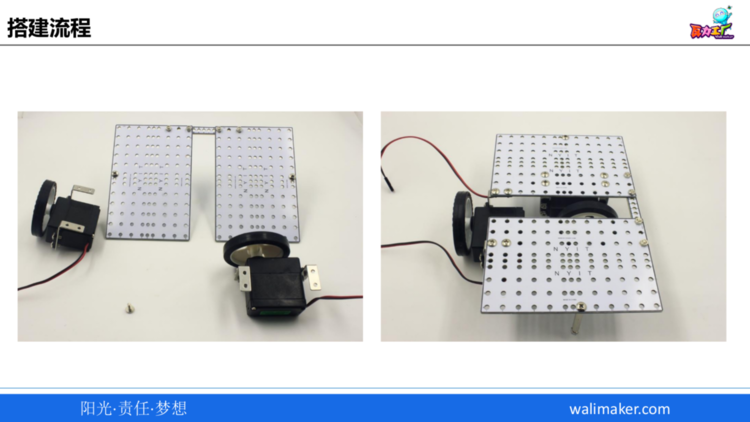
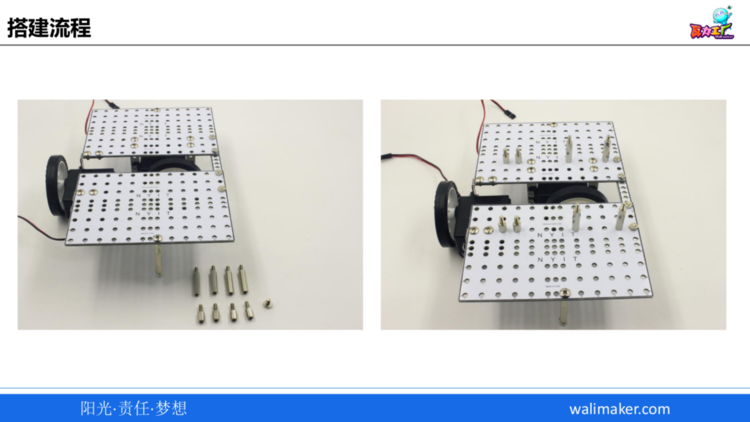
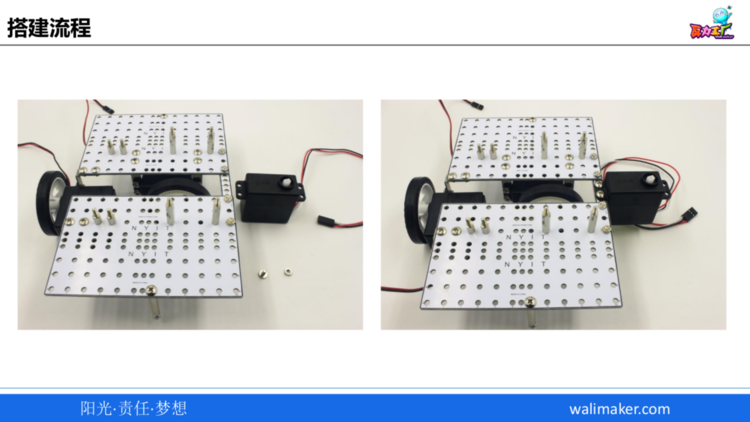
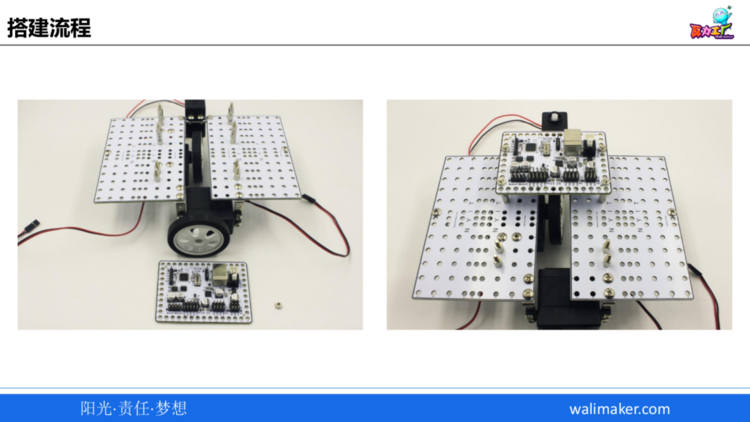
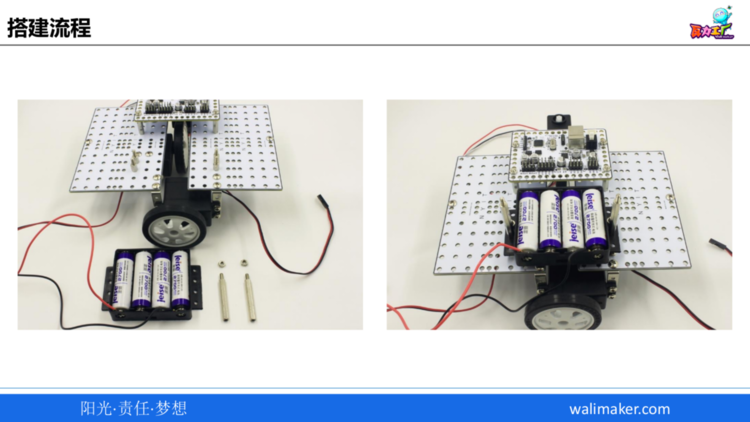
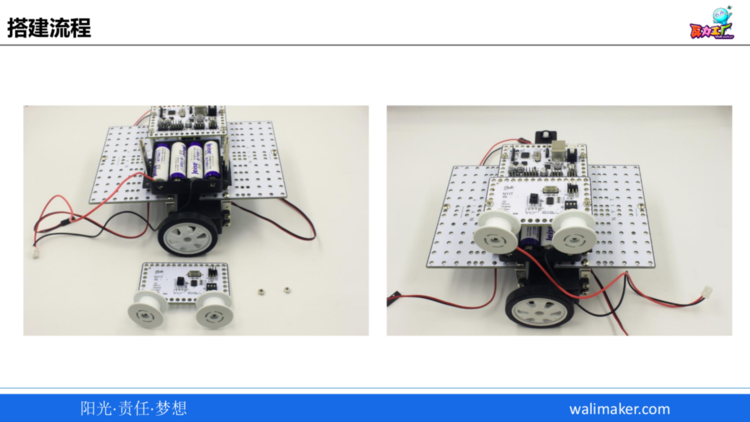
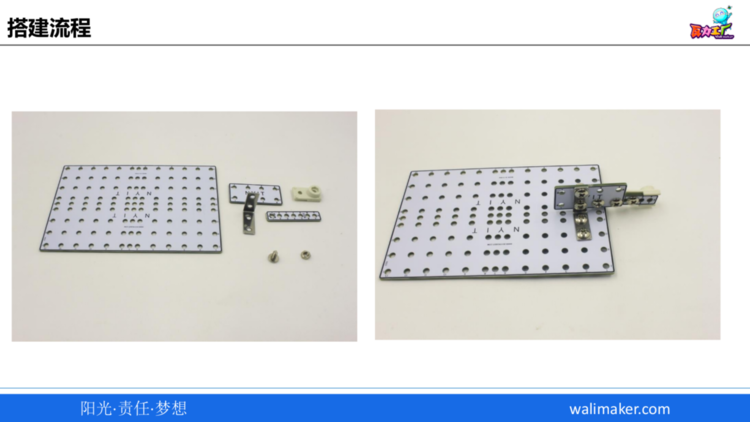
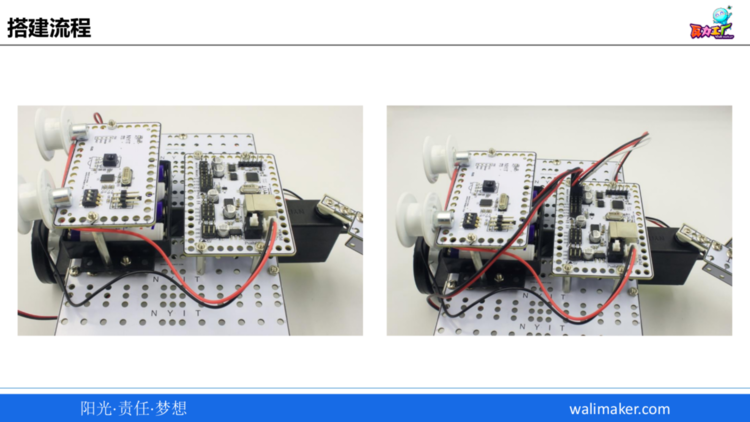
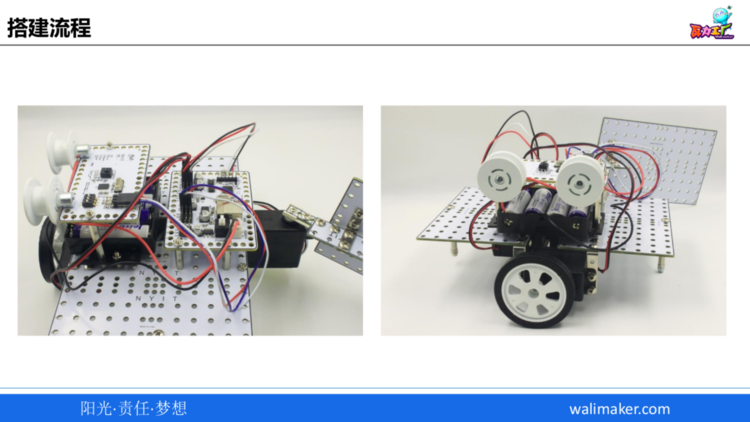
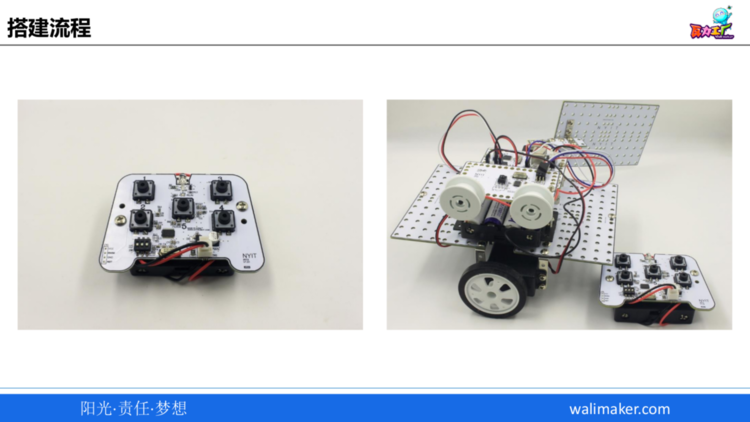
构建步骤:


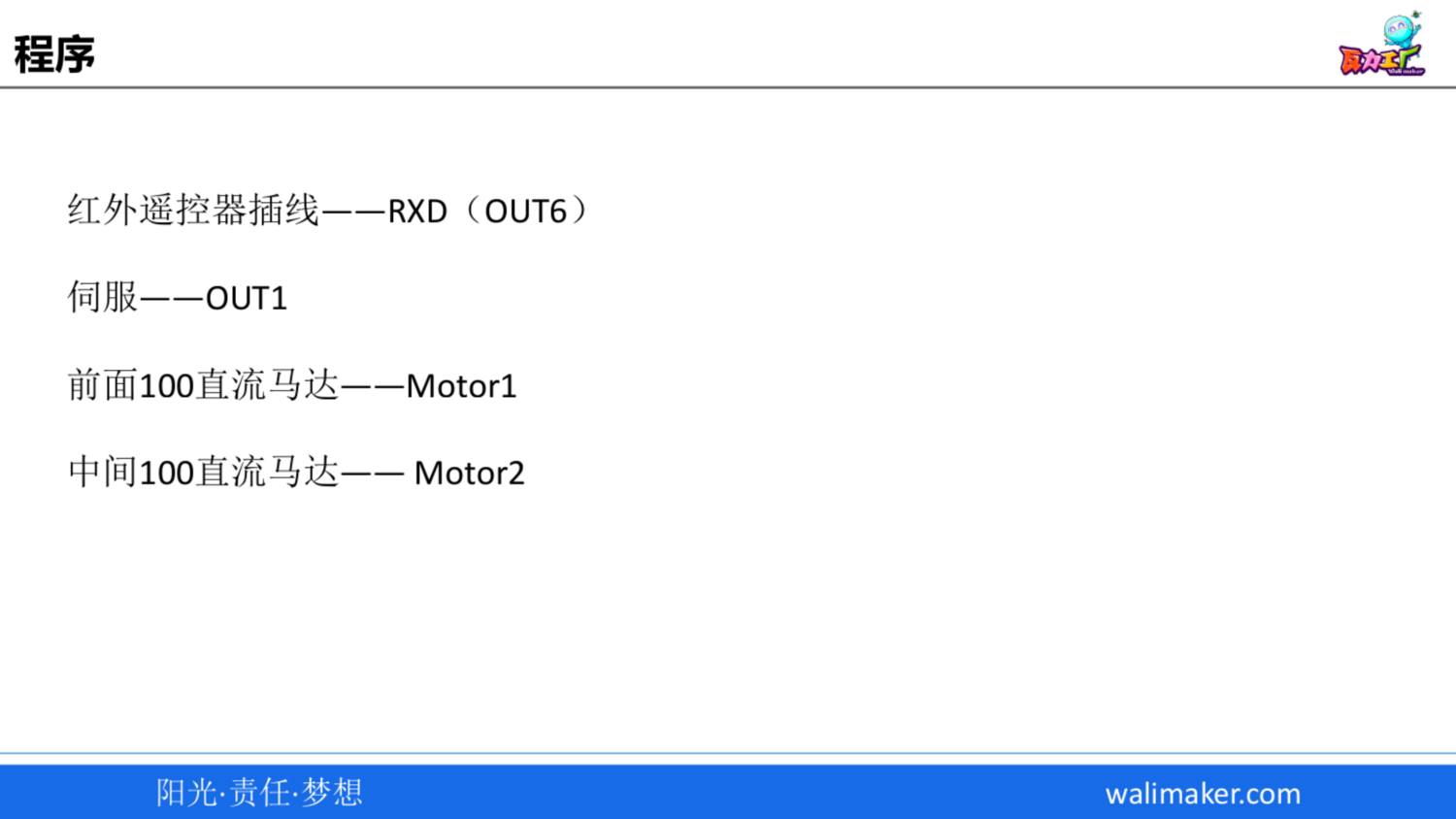
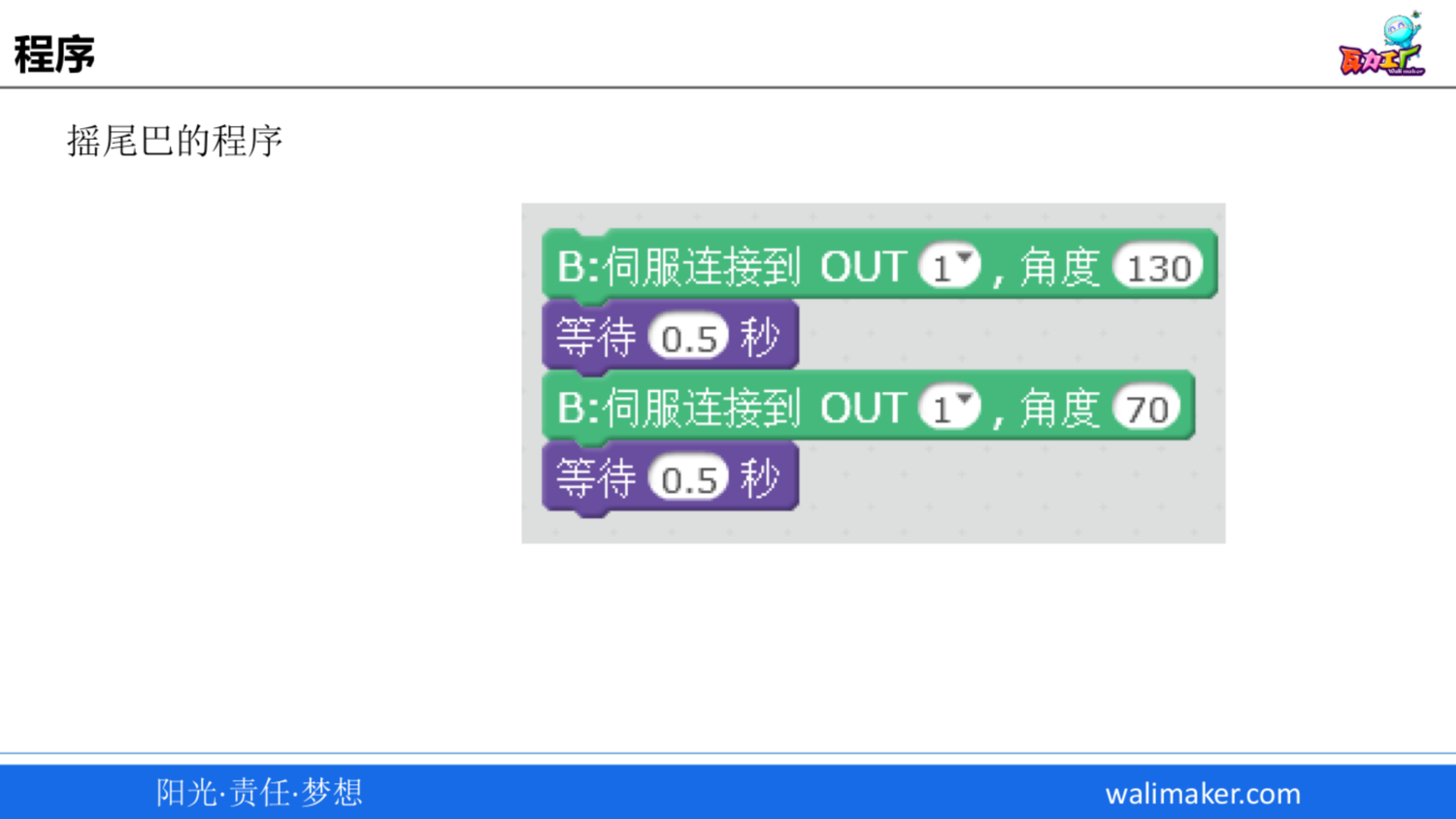
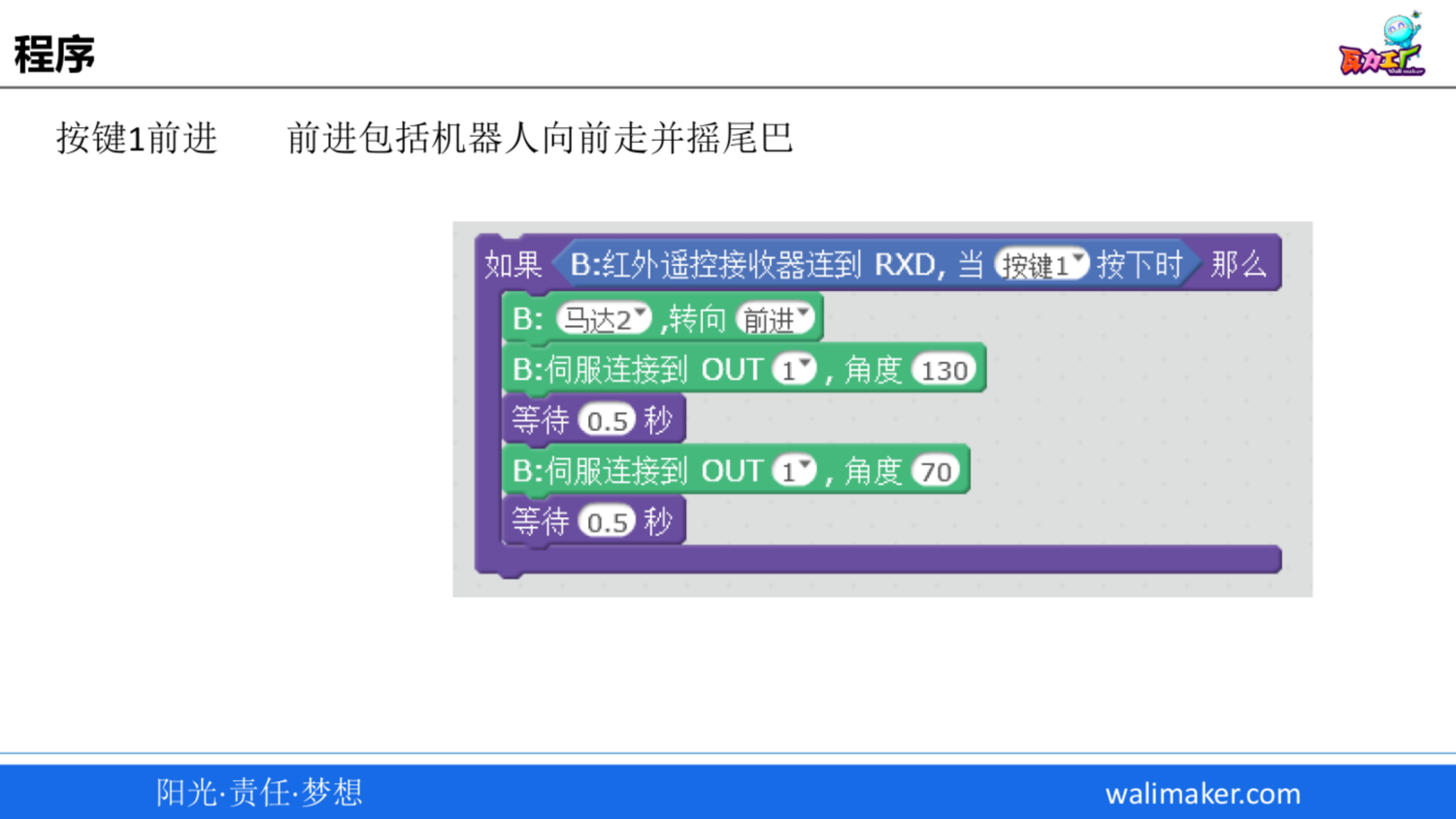
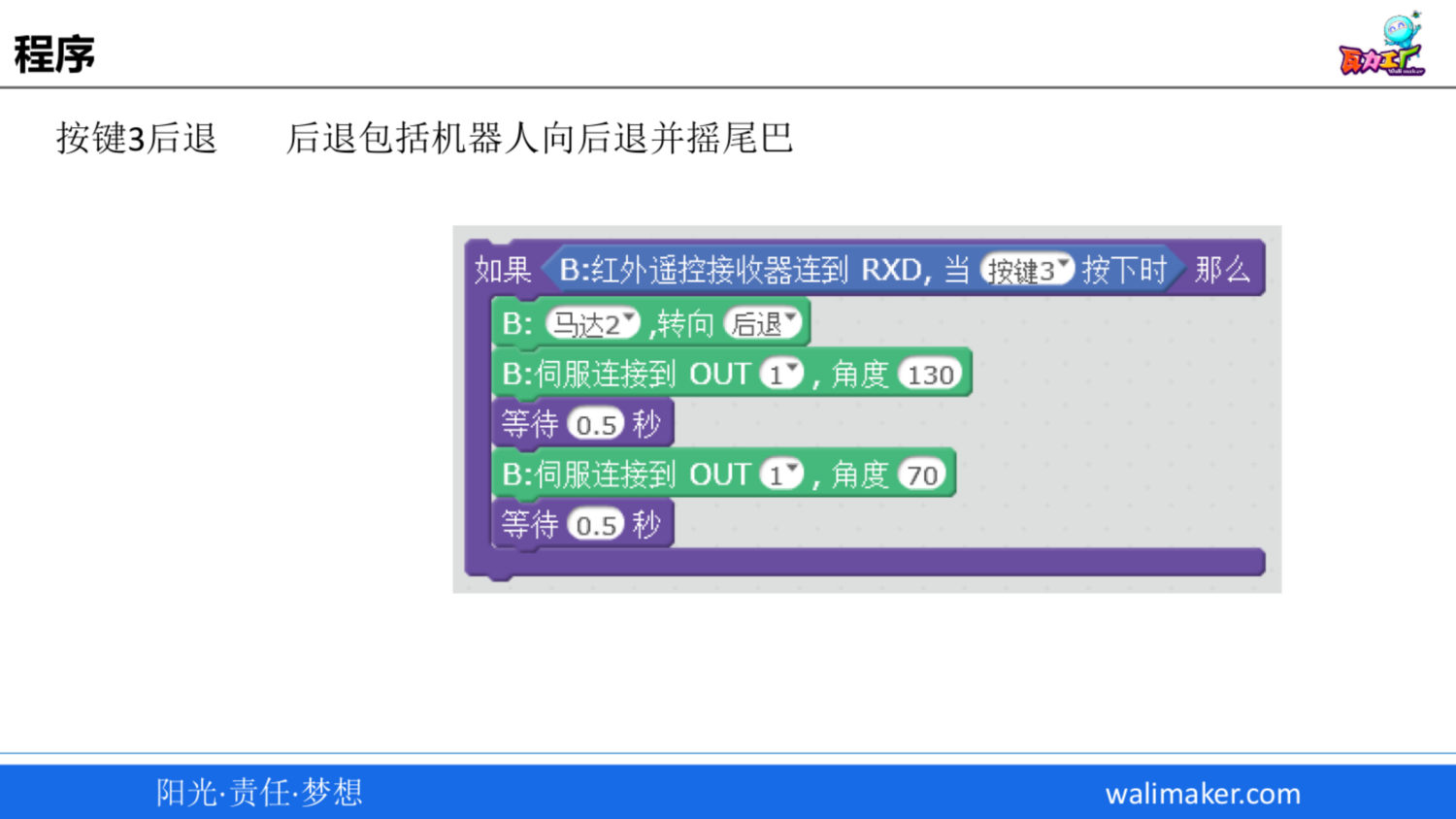
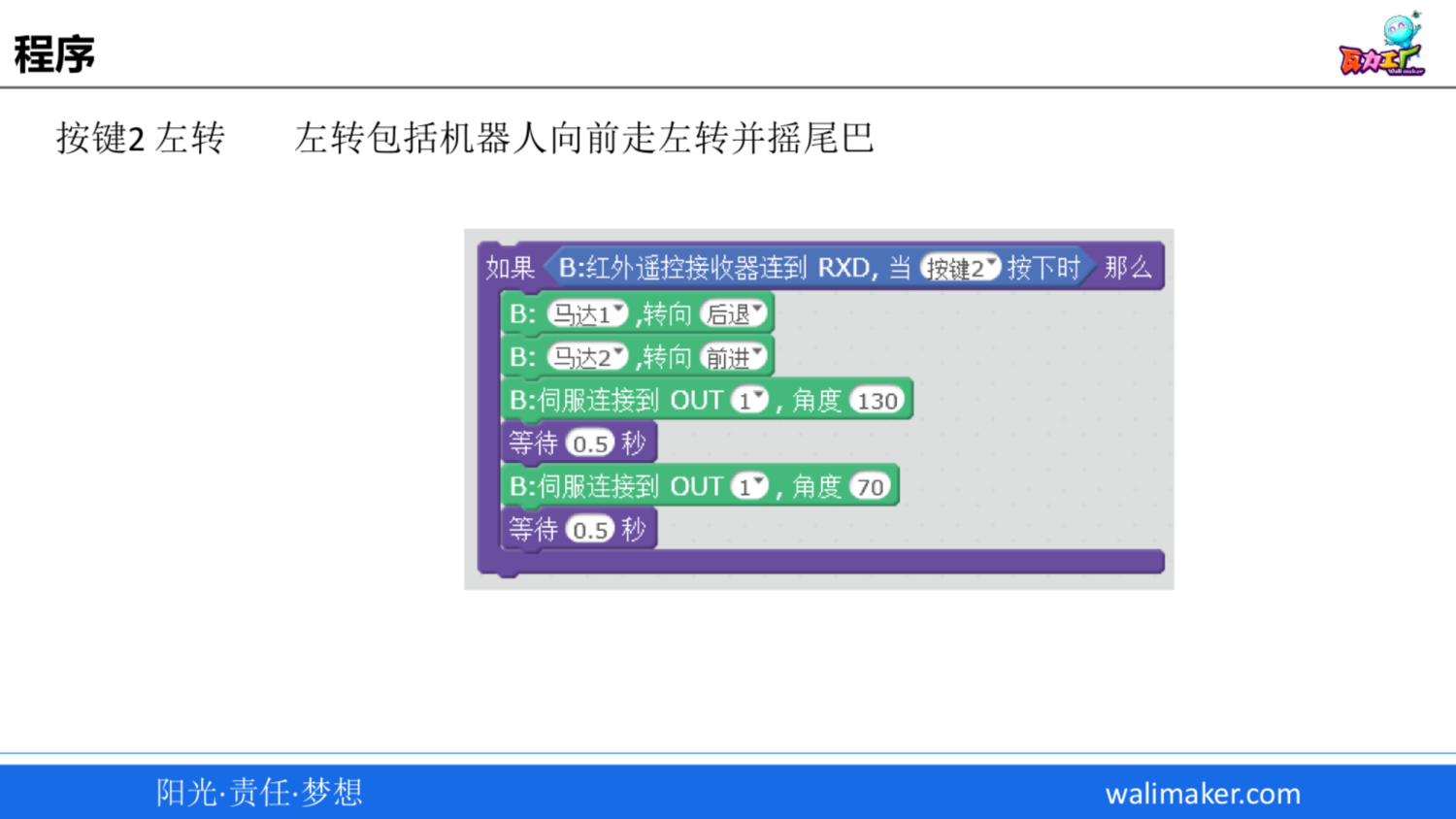
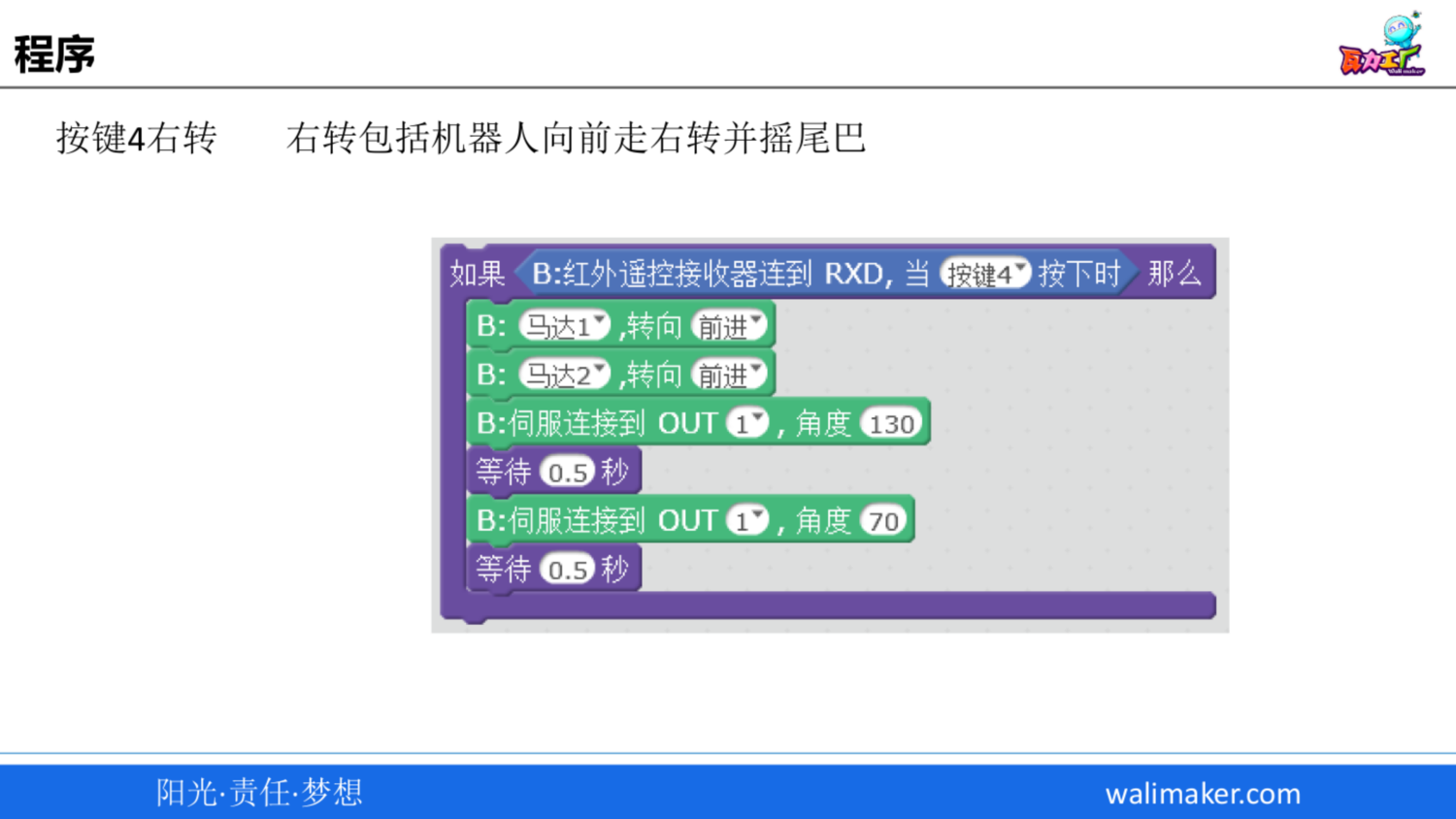
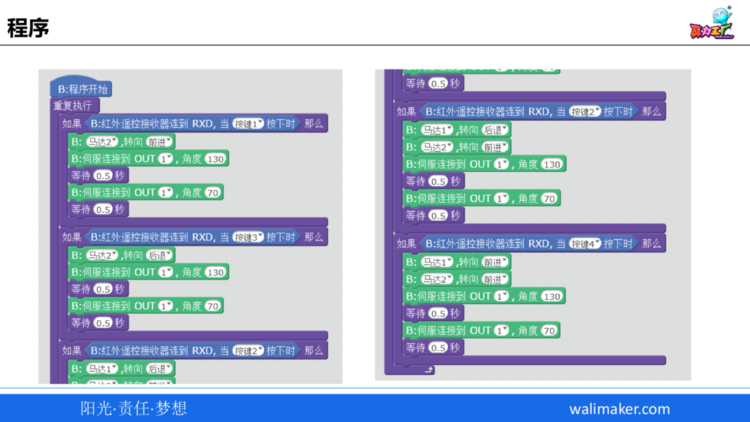

接力赛机器人程序设计:
道闸机器人已完成,有什么疑问,加老师微信进行咨询吧!