情景任务:
瓦力工程师接到一个新任务,就是为“国防部”设计装甲车。来满足国防和维稳中用装甲车反坦克、扫雷、通讯和反恐的需要。现在要求制作发射导弹的装甲车,导弹发射时的角度可以自由调整。

任务分解:
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
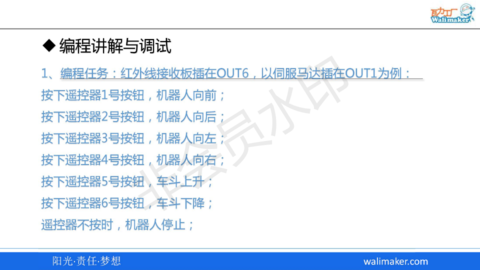
3.需要有前进、加速、减速、停止、转弯、后退的控制方法
4.需要有装甲车的形状、特点。
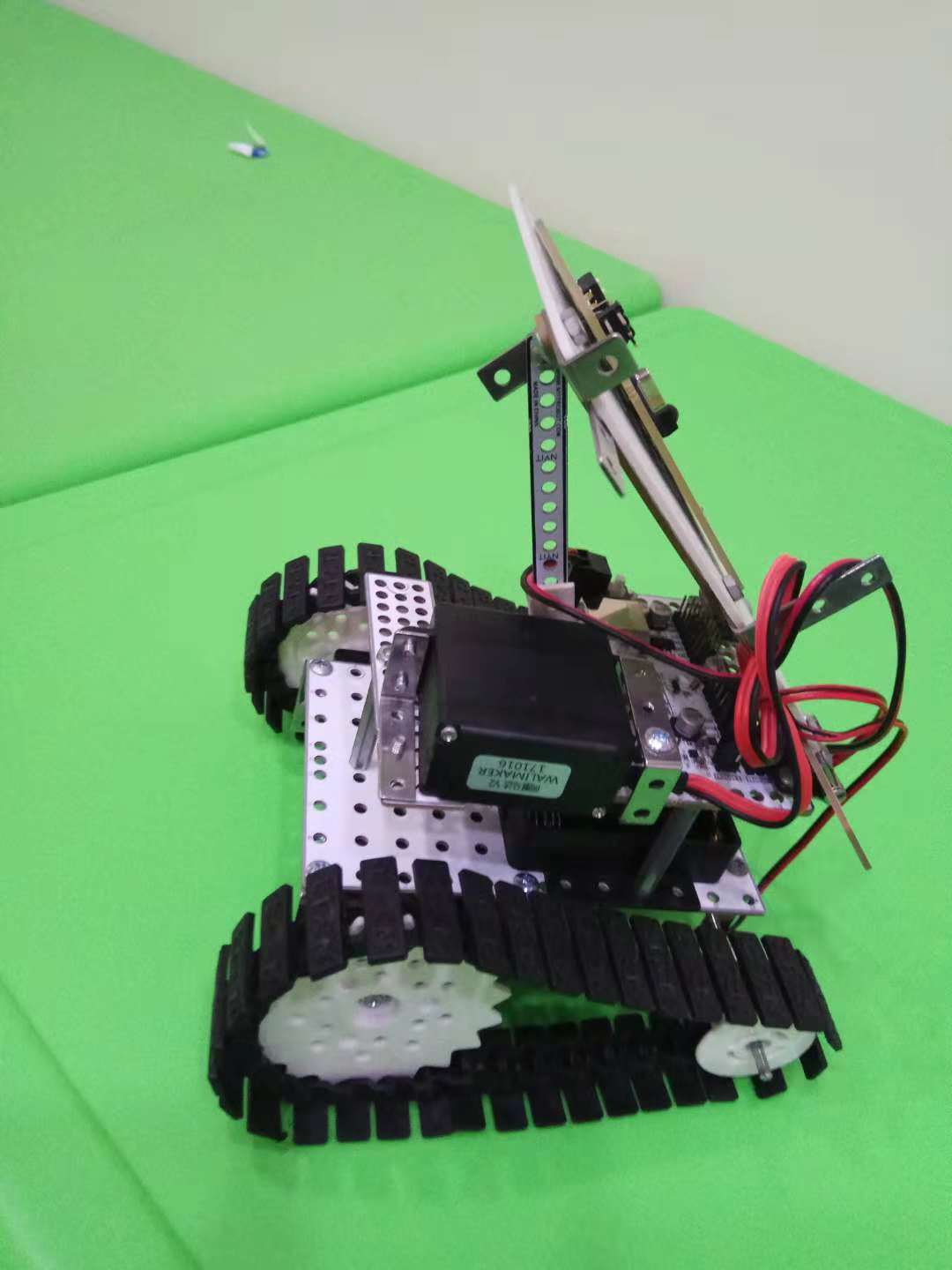
5.调整发射角度,利用马达导杆,控制发射角度。
知识点拓展:
装甲车是具有装甲防护的各种履带或轮式军用车辆,是装有装甲的军用或警用车辆的统称。坦克也是装甲车履带式装甲车辆的一种,但是在习惯上通常因作战用途另外独立分类,而装甲车辆多半是指防护力与火力较坦克弱的车种。
装甲车的特性为具有高度的越野机动性能,有一定的防护和火力作用,分为履带式和轮式两种,一般装备一至两门中小口径火炮及数挺机枪,一些还装有反坦克导弹,结构以装甲车体、武器系统、动力装置等组成。
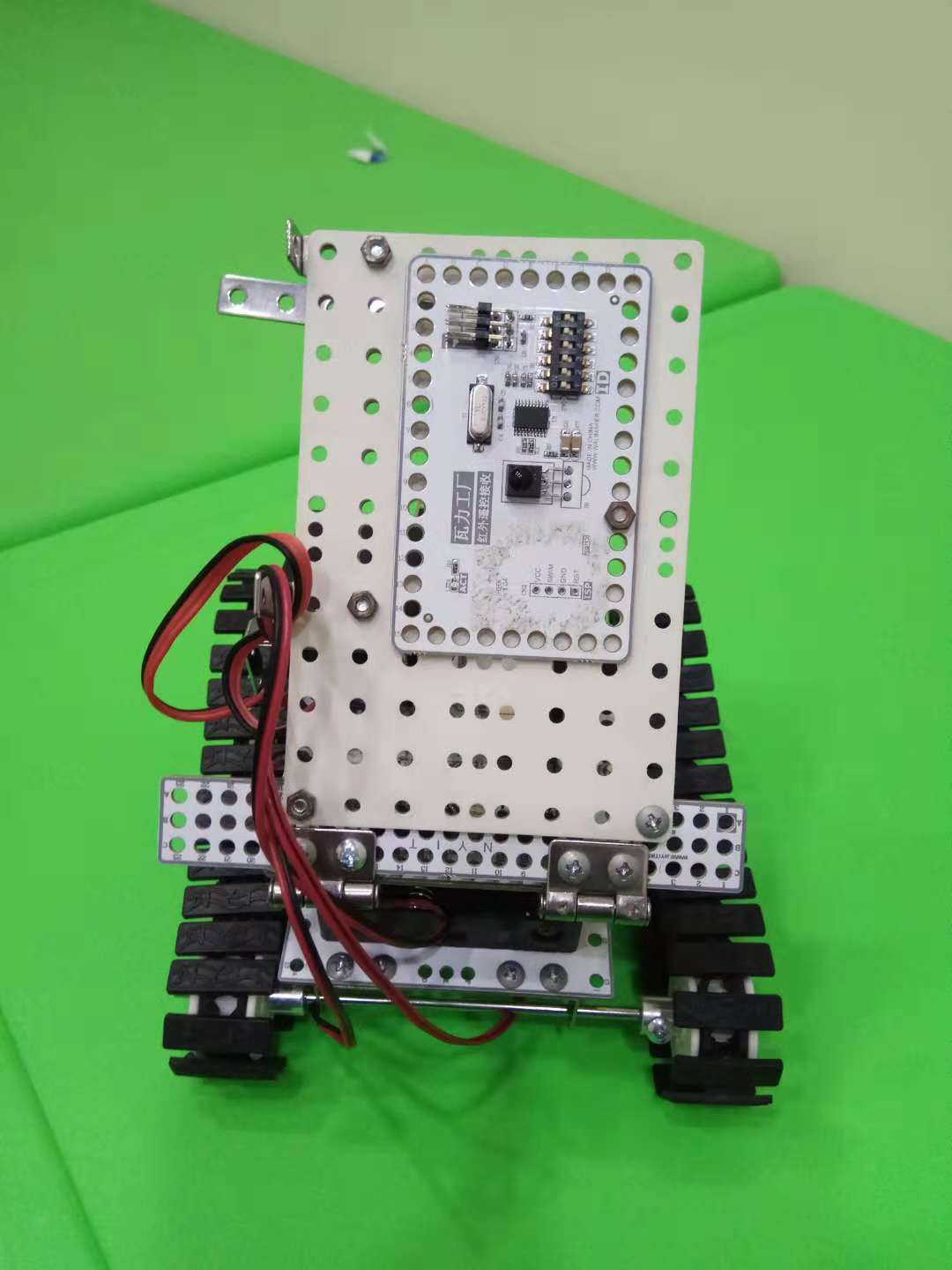
器材分解:
电池盒、轮子、CPU、触碰开光、LED灯、蜂鸣器,伺服马达,导杆系统
学习目标:
1.三个马达的控制方法
2.了解装甲车的基础知识。
3.了解导杆系统在控制系统角度方面的应用。
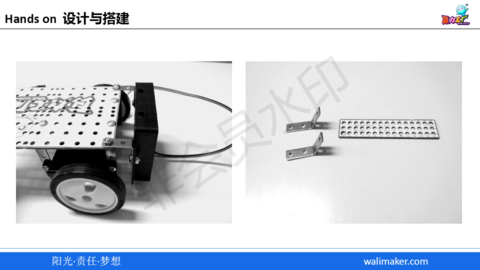
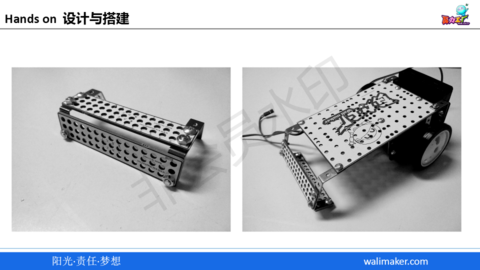
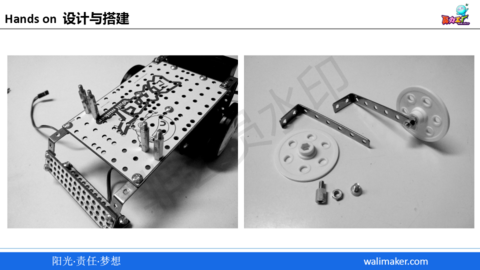
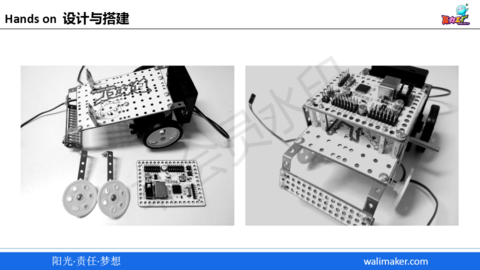
构建步骤:



装甲车机器人程序设计:

装甲车机器人,有什么疑问,加老师微信进行咨询吧!