情景任务:
瓦力工程师接到一个新任务,就是为“最后一公里”设计机器人。“最后一公里”指的是人们在上下学或上下班的途中,乘坐公共交通工具到达公交站,地铁站后,还需要走最后一公里才能达到目的地。作为瓦力工程师的我们怎么设计滑板车机器人,来帮助人们更方便的完成最后一公里呢?

任务分解:
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、加速、减速、停止、转弯、后退?的控制方法
4.需要有声光指示、装饰
知识点拓展:
平衡车原理:当我们在驾驶平衡车的时候,平衡车的两个轮子就代替了双脚。与身体的平衡系统非常类似,当我们的重心前倾时,智能系统就会自动感应到,并精确地驱动轮子向前运动,以保持平衡;同样地,当我们身体的重心后倾时,轮子就会向后运动。
这套工作原理被称为“动态平衡”原理,这也是平衡车被叫做“平衡车”的原因,采用第二代运动补偿算法,利用其内部的陀螺仪和加速度传感器,来精确检测车体姿态的微小变化,并利用精密的伺服控制系统,灵敏地驱动电机,进行相应的调整,以保持整个车体的稳定和平衡。
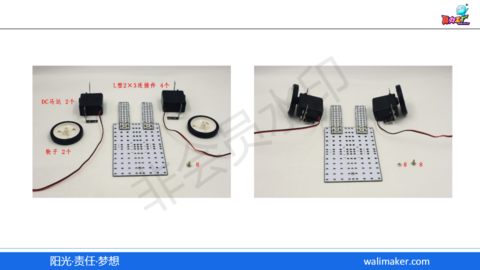
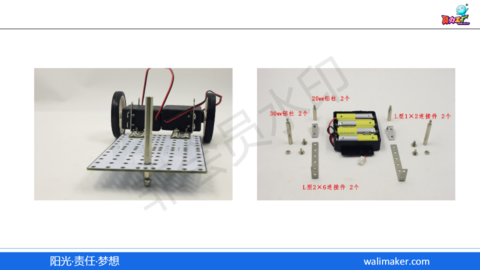
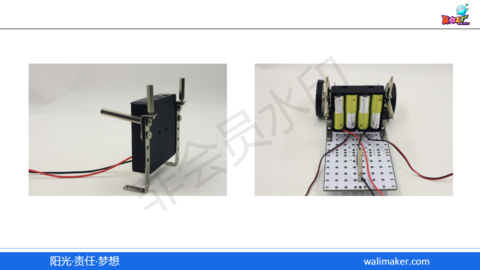
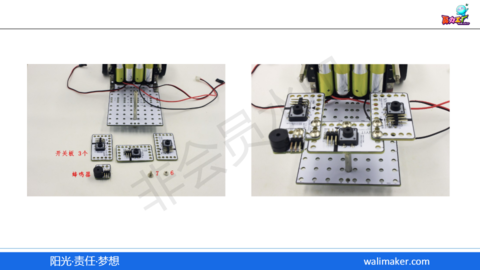
器材分解:
电池盒、轮子、CPU、触碰开光、LED灯、蜂鸣器
学习目标:
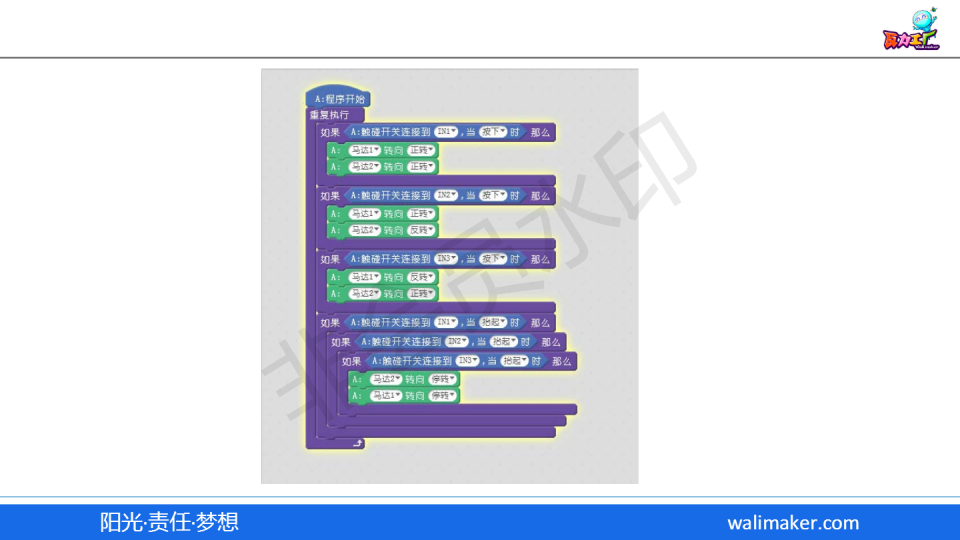
1.复习触碰开关的工作原理。
2.了解人们的代步工具。
3.熟练运用循环模块(While)进行输入、输出控制。
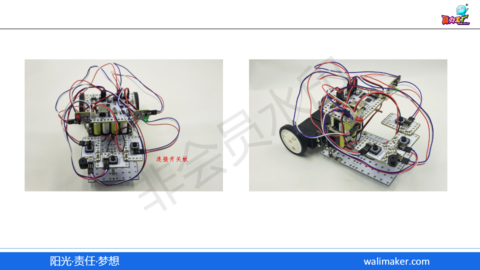
构建步骤:






程序设计: