情景任务:
小瓦力来到一处神秘的宫殿,瓦力打开宫殿大门,刚走出一步,突然感到脚下的石头像一个开关一样咯地响了一声,然后抬头一看,一块石头从正上方掉了下来,看来有机关,危险。迅速后退。不能灵活躲避落石的机器人永远无法通过最后的机关,瓦力心里想到。怎么办呢?有了,用螳螂机器人带我过去。

知识点拓展:
螳螂是昆虫中体型偏大的,体长一般55到105毫米,非洲的螳螂是世界最
螳螂。大的,身体流线型,以绿色,褐色为主,也具有花斑的种类;标志性特征是有两把“大刀”,即前肢,上有一排坚硬的锯齿,大刀钩末端长有攀爬的吸盘。头部呈扇形,较小;复眼突出,大而透亮,以黄绿色为主,晚上在灯光下呈现黑色,单眼,在两眼之间有3个小点即单眼;触角细长;颈部可180度转动;咀嚼式口器,上颚强劲。前足腿节和胫节有利刺,胫节镰刀状,常向腿节折叠,形成可以捕捉猎物的前足;前翅轻柔,遮住身体全部为覆翅,后翅比前翅要薄,边缘透明色,中间成放射状的紫红色、伸展开呈现扇状,休息时收敛和前翅相合;腹部肥大。前足锋利发达善于捕捉,中、后足适于步行,但有时前足也会用来保持平衡,发育呈变态发育。
红外避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。
任务分解:
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、后退、转弯的控制方法(不能手动)
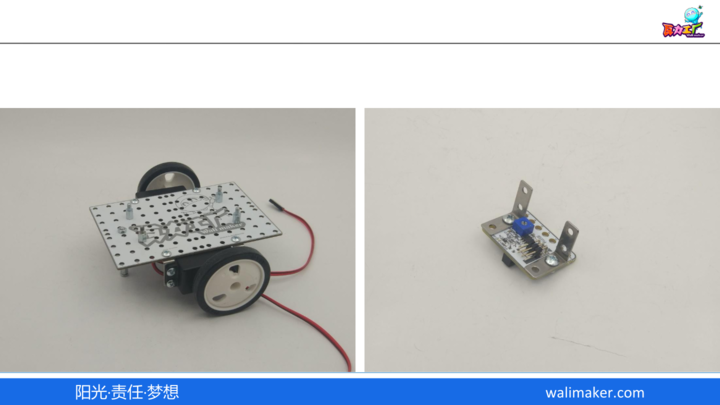
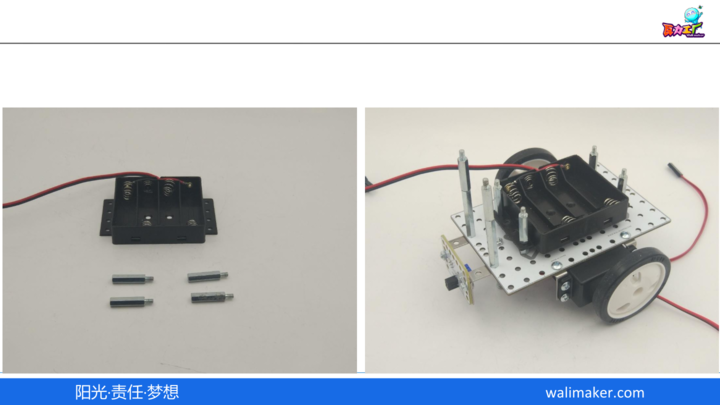
器材分解:
电池盒、马达、轮子、CPU、红外避障传感器、附件
学习目标:
课程目标:
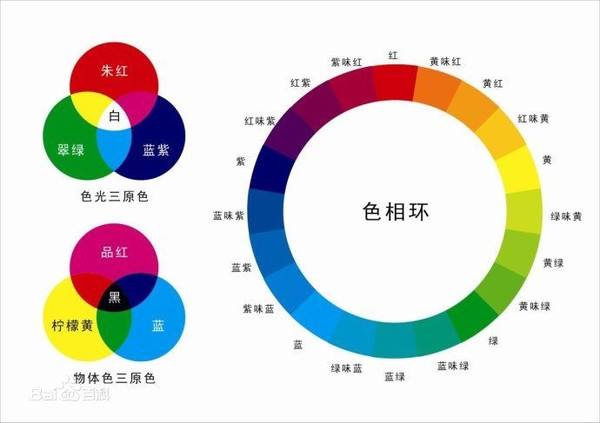
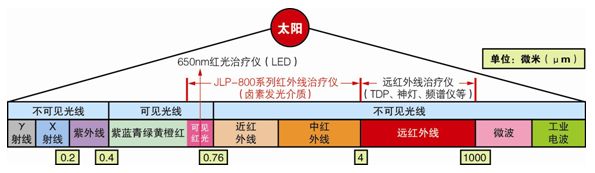
1.自然界的光线
2.红外传感器的原理
3.如果那么模块的使用
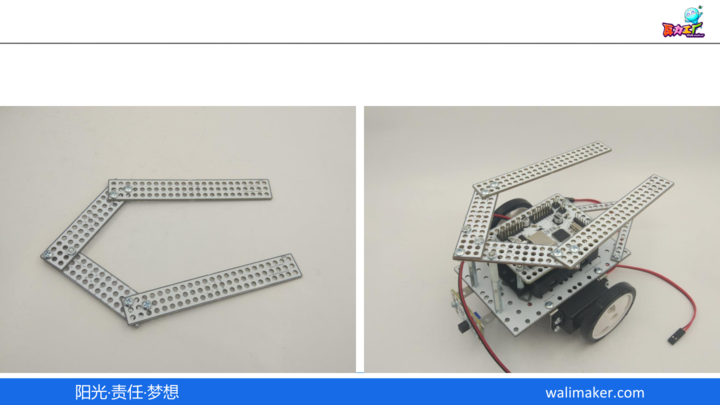
构建步骤:




接力赛机器人程序设计:

感应机器人已完成,有什么疑问,加老师微信进行咨询吧!