情景任务:
瓦力来到了一个特殊的餐厅,这里的服务员只有机器人。点菜、送餐、结账都是由机器人来完成,瓦力对送餐机器人很感兴趣,并发现了一个奇怪的方,每个送餐机器人的脚下都有一条黑线,他们会沿黑色的线行走。瓦力回家查阅资料才明白,原来是利用红外线巡线原理完成的,聪明的瓦力工程师们,让我们一起制作一个巡线机器人吧。
学习目标:
1.单巡线机器人的原理。
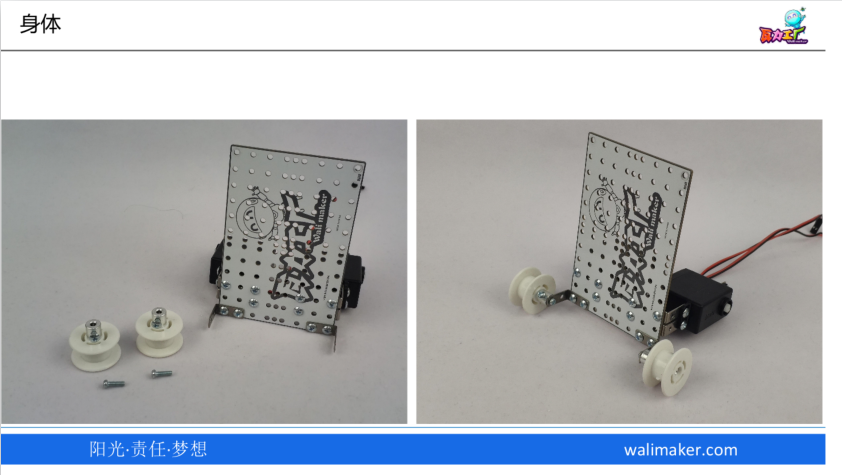
2.单巡线机器人搭建时重心的稳定。
3.单巡线机器人的编程逻辑。
知识点拓展:
随着科技的发展,已经有一些餐厅使用机器人送餐了。在餐厅营业期间,机器人脚底踩着轨道,手上稳稳端着托盘,沿着提前铺设好的环形轨道,面带微笑,端着酒水送着食物。客人可以在行走期间随意将食品拿到桌上,机器人也会沿着轨道继续前行。由于器人是根据设程序设定沿轨道前行,一旦有人出现在行驶路线上,红外感应器就会反应,机器人会自动停下,并语音提示,可以保证店内食客的安全。
红外传感器特性:
1.反射 : 在有效范围内,红外线发射管发射的红外线可以被反射,接收管接收到信号。
2.吸收: 发射管发出的红外线遇到黑色物体时,会被吸收掉,没有返回信号。
任务分解:
1.需要外界能量提供动力
2.需要有轮子。
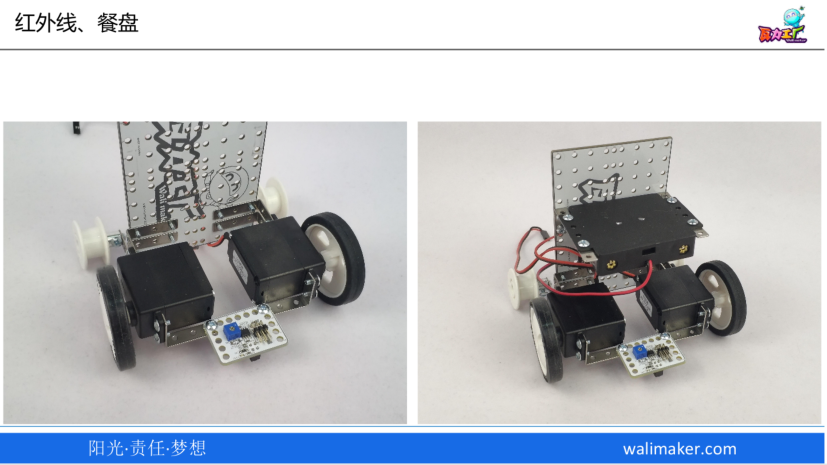
3.需要有黑线的检测原件。
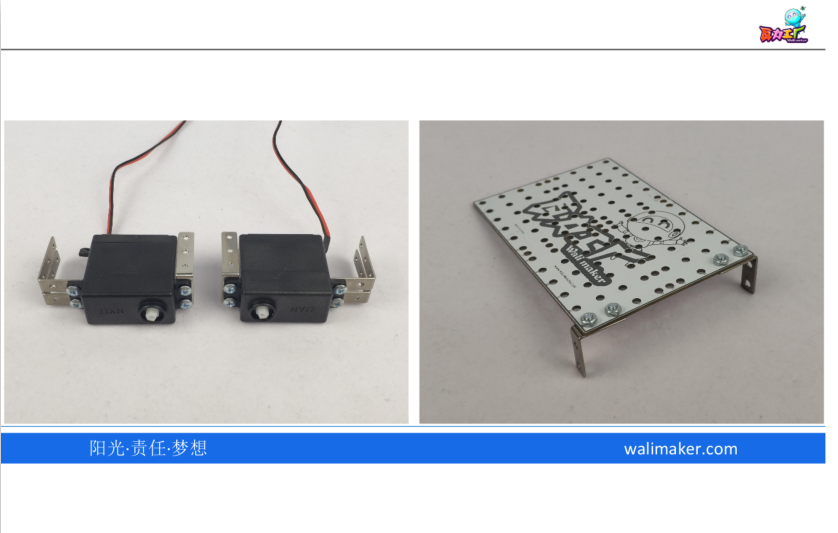
器材分解:
电池盒、CPU、轮子、蜂鸣器、LED灯、红外传感器。
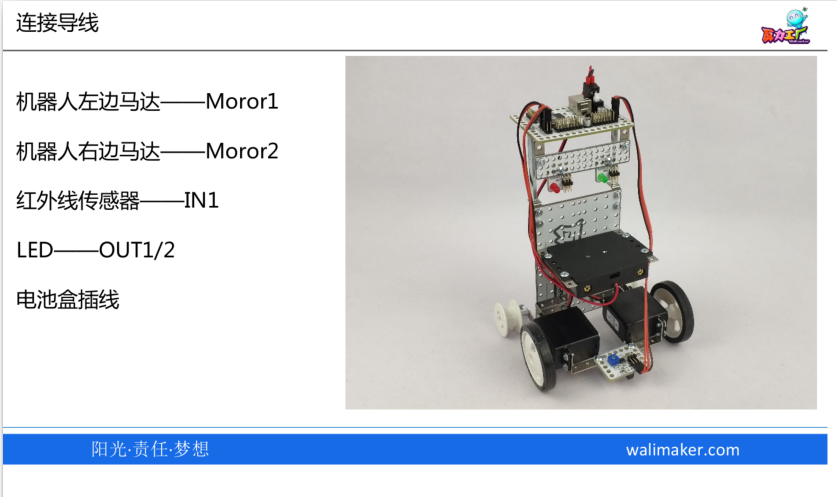
构建步骤:


送餐机器人程序设计:

送餐机器人完成了,有什么疑问,加老师微信进行咨询吧!