创建文件、文件夹
1 | package main |
1 | package main |
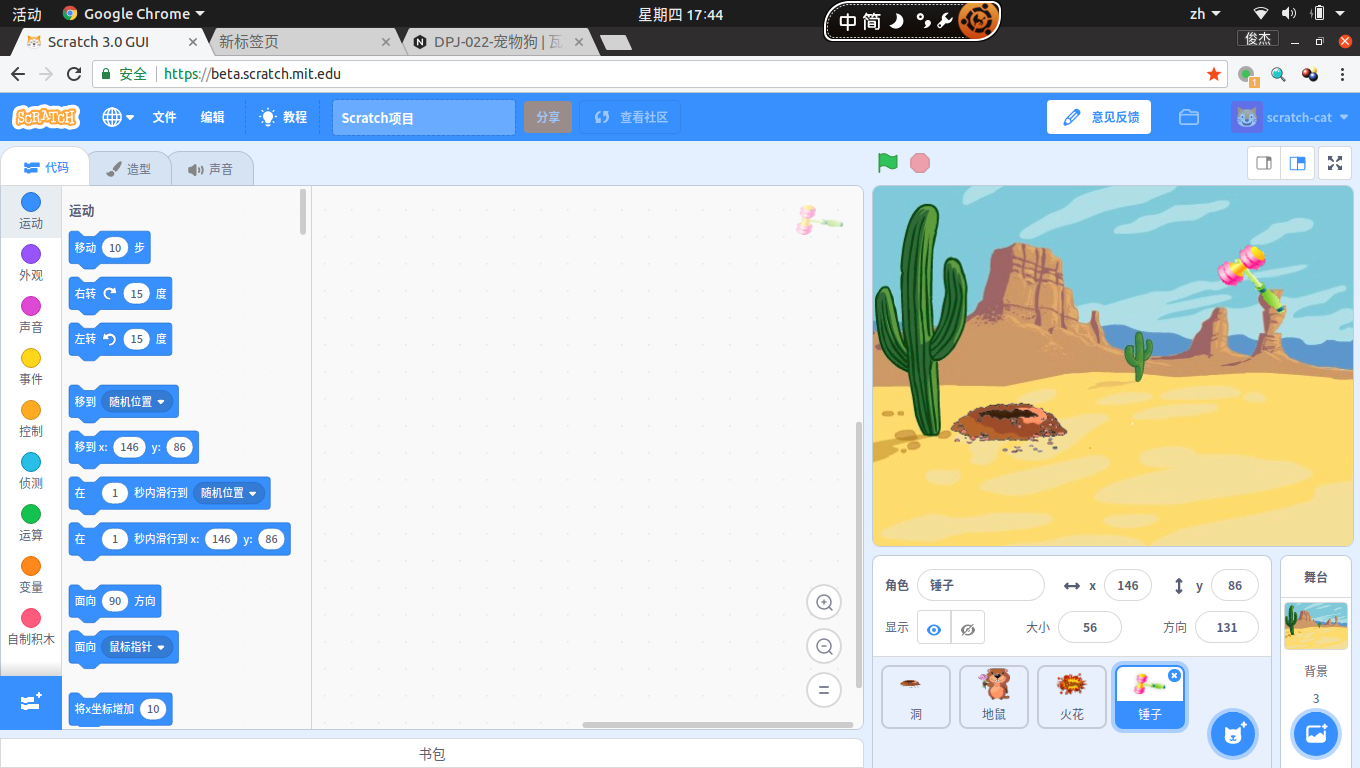
输入IP地址 http://192.168.0.103:8061/ 打开Scratch3.0 客户端
从ftp 服务器上下载所需的素材文件夹
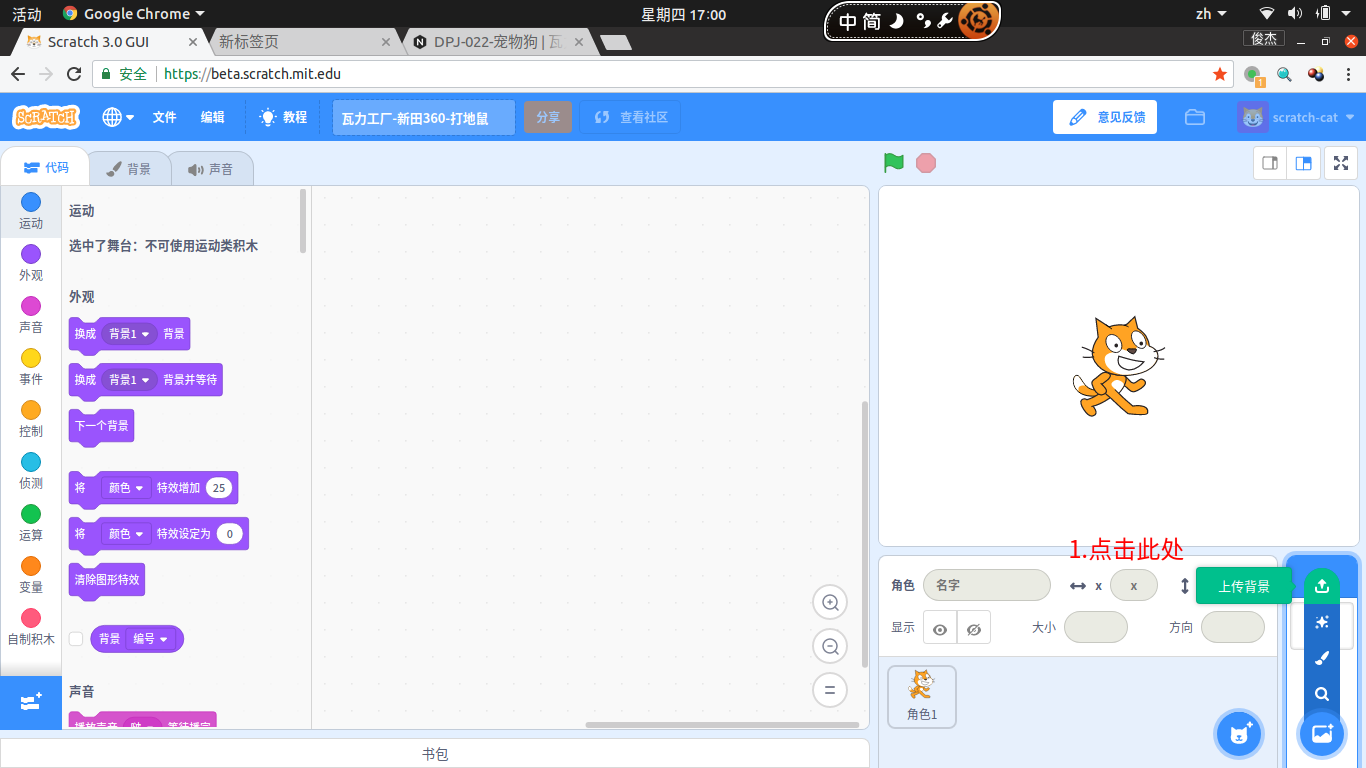
点击上传背景图,上传desert.jpg

删除默认的角色
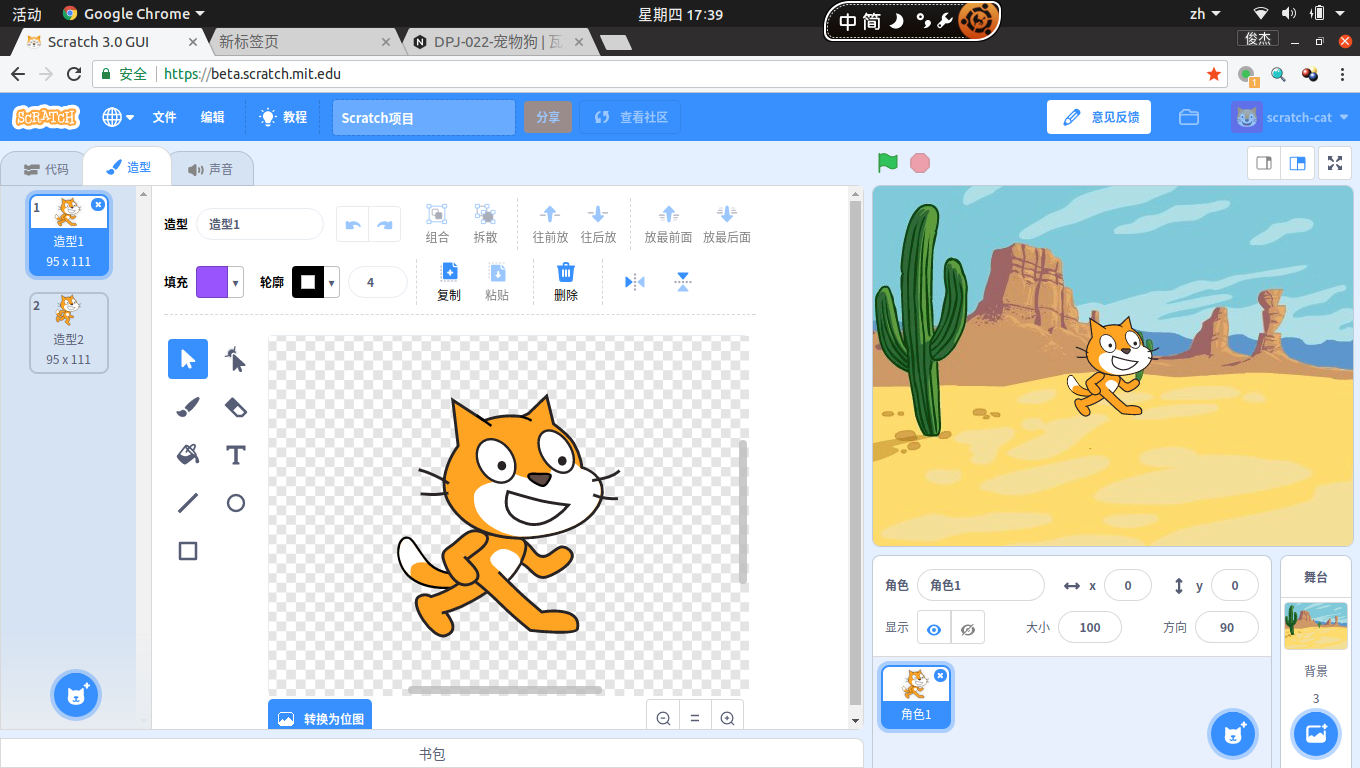
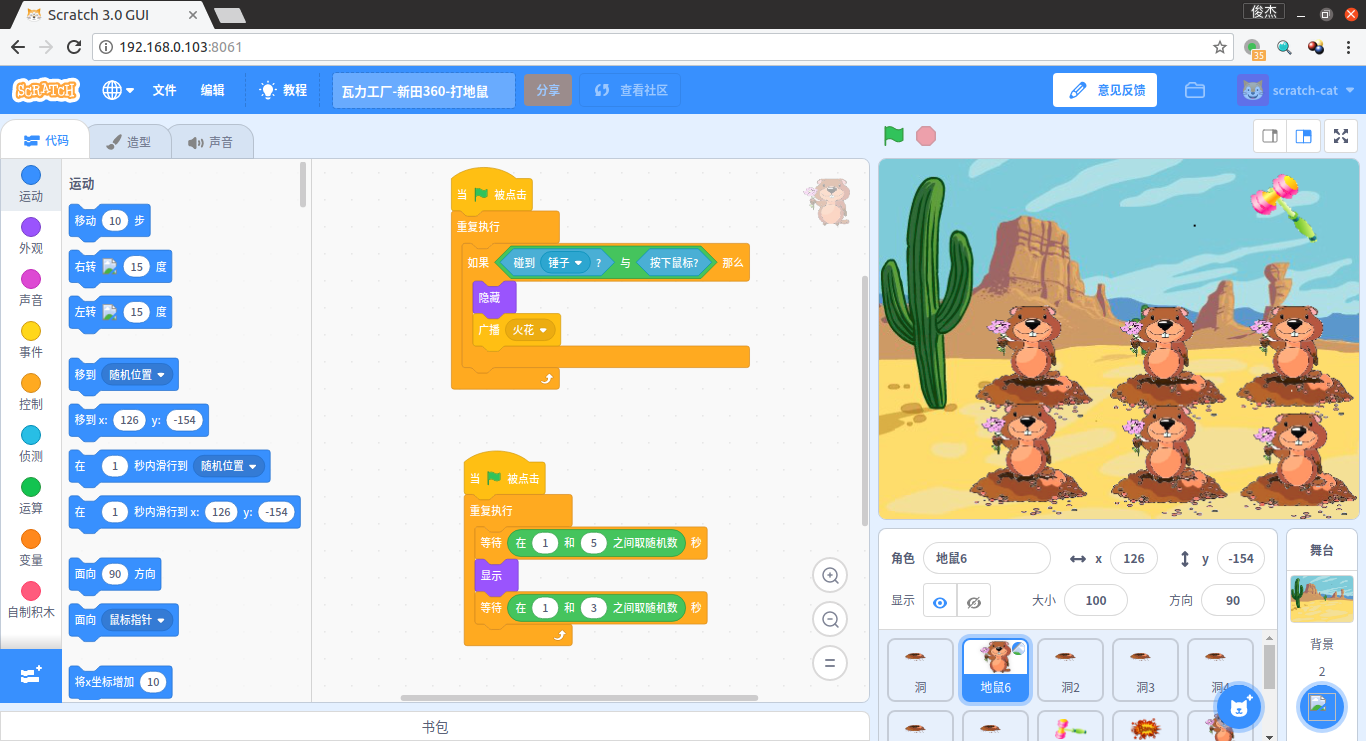
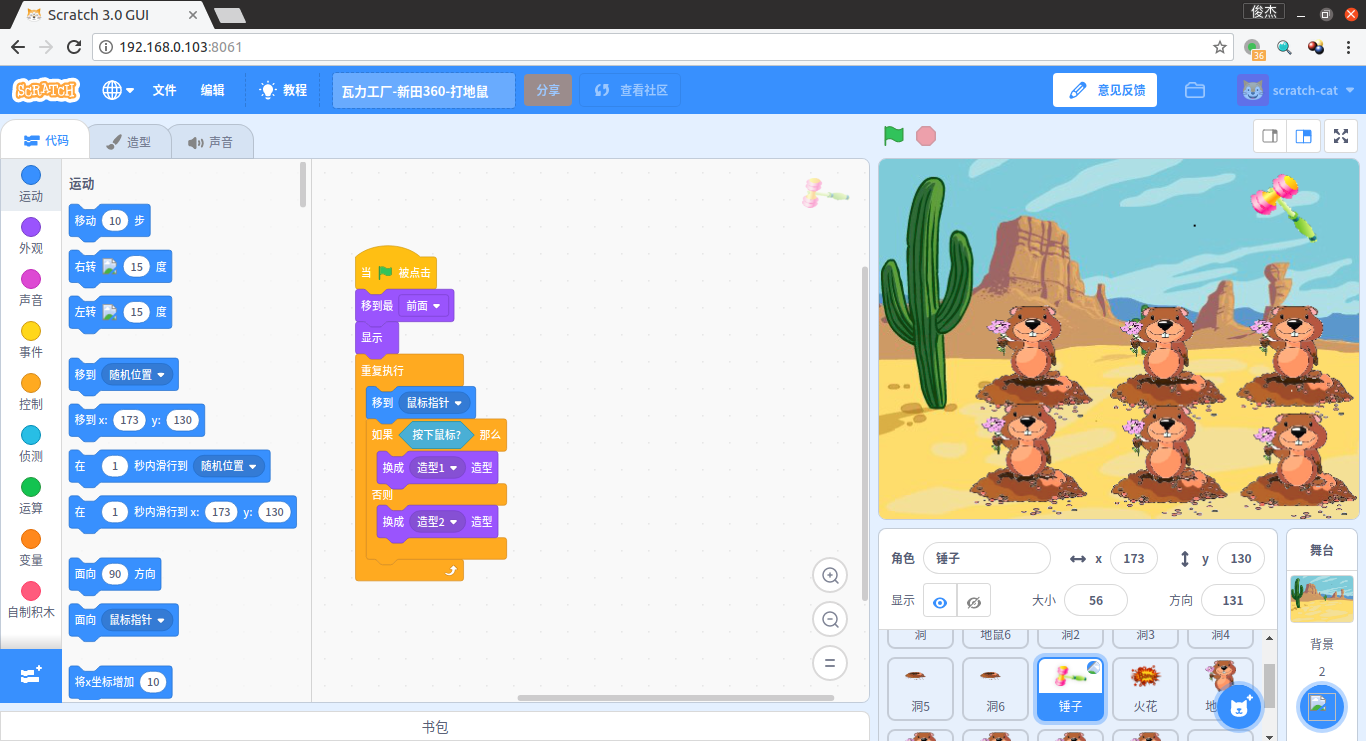
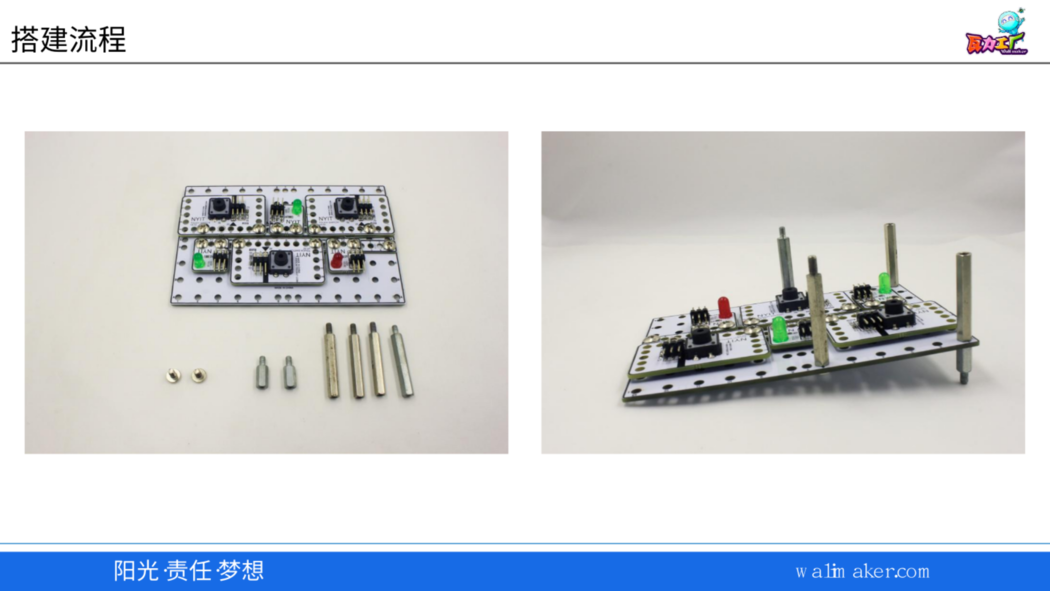
点击上传角色,依次上传角色洞、地鼠、火花、锤子。

添加程序所需的变量:地鼠个数、总分、时间。





/瓦力.jpeg)
一条鳄鱼患了蛀牙,去看牙医,鳄鱼在心里对着自己不停滴说:“我真的不想看到他,但是我非看不可。而诊所里的牙医也在想:”我真的不想看到他,但是我非看不可“。
鳄鱼看到牙医吓得叫出了声:啊!牙医看到鳄鱼吓得叫出了声:啊!鳄鱼看着椅子:我一定得去吗?牙医看着鳄鱼:我一定得去吗?鳄鱼坐到了椅子上:我好害怕。牙医拿起了牙钻:我好害怕。鳄鱼对自己说:我一定要勇敢。牙医对自己说:我一定要勇敢。鳄鱼张大了嘴巴:我做好最坏的打算了。牙医把手伸进了鳄鱼的嘴巴:我做好最坏的打算了。鳄鱼被牙钻钻痛了:哎哟!牙医的手被鳄鱼的嘴咬痛了:哎哟!鳄鱼捂着嘴巴:这是一件多么可怕的事。牙医捂着手腕:这是一件多么可怕的事。鳄鱼又张大了嘴巴:不用太久……牙医又把手伸进了鳄鱼的嘴巴:不用太久……
鳄鱼给牙医行了个礼:多谢您啦!明年再见。牙医给鳄鱼还了个礼:多谢您啦!明年再见。 可走出诊所的鳄鱼却在想:我明年真的不想再见到他……牙医在窗口看着鳄鱼也在想:我明年真的不想再见到他……
鳄鱼说:所以我一定不要忘记刷牙。牙医说:所以你一定不要忘记刷牙。

概率学随机概念为各时间发生的概率相同,统计随机概念为一个件的结果不受事件的影响或影响较小。
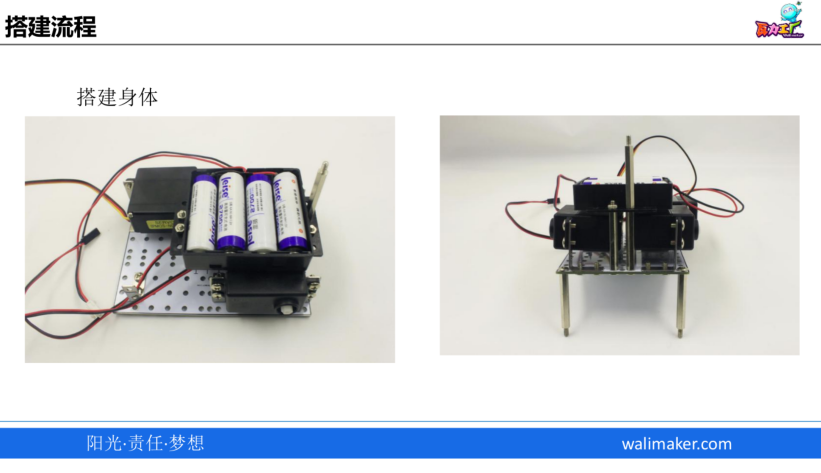
1.需要外界能量提供动力
2.需要触碰开关感受到信号。
3.需要通过触碰开关信号,控制车轮运动。
电池盒、马达、CPU、LED灯、触碰开关、附件
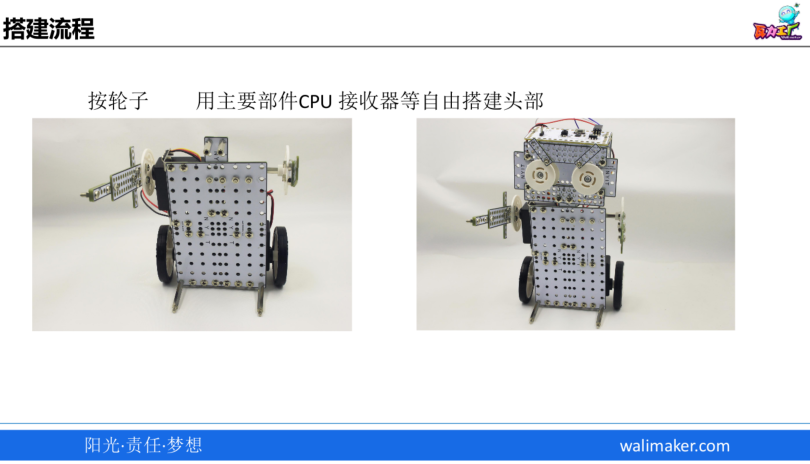
1.学习触碰开关工作原理.
2.学习保险杠机器人的工作原理。
3.熟练应用 while、break和触碰开关模块编程。




鳄鱼机器人已完成,有什么疑问,加老师微信进行咨询吧!
Scratch3.0 已经大致完工,界面漂亮,但是要访问其官网则需要科学上网,其速度也非常慢。想要和学生一起随着3.0成长则不免要本地部署。
Scratch3.0 在github上的位
https://github.com/LLK
我们只需要scratch-gui,于是一行如下代码
git clone git@github.com:LLK/scratch-gui.git
10k/s,多久没有这么慢的速度了,工作的时候电脑下载了,下载了2天没有下载完成。各种断开重来。
于是在网上查资料,得到曲线救国的方案。
git clone –depth=1 git@github.com:LLK/scratch-gui.git
只下载最新一层的更新,然后在项目目录下:
git fetch –unshallow #转换为一个完整的仓库
git 完成后,运行命令:
nmp install
nmp start
本地Scratch3.0已经可以运行,心中美美的。接着在局域网另一台电脑上输入本机IP地址,悲剧了,连不上。
接着找资料,各种论坛狂逛,有一篇说是安装Scratch-www的可以访问,于是Scratch-www、Scratch-wm、等等一并下载安装。满怀期待这样就能解决局域网连接问题,然而,确是伴随着一系列的解决问题时的失望。
接着就和webpack较上了劲。webpack-dev-server的使用一阵狂查,网上各种帖说webpack-dev-server
有默认本机访问,局域网访问需要指定本机IP地址。按帖子的方法一个个实验,都是无功而返。一不做二不休,问题还是要解决的,于是我上webpack-dev-server的官网,英文说明书一阵狂看,有点费劲,继而找到中文最新官方文档,从头看到尾,终于找到解决方案。
https://github.com/webpack/webpack/releases
https://webpack.docschina.org/concepts/
https://webpack.docschina.org/configuration/dev-server
devServer.host
string
指定使用一个 host。默认是 localhost。如果你希望服务器外部可访问,指定如下:
module.exports = {
//…
devServer: {
host: ‘0.0.0.0’
}
};
通过 CLI 使用
webpack-dev-server –host 0.0.0.0
按照官方最新文档进行配置,然而…
突然想起在安装Scratch需要在root权限下,于是切换到root npm start …
算了,用nginx 架站来处理吧。
于是看到 …
2.调整防火墙,以免出现各种问题
$ sudo ufw app list
对,ufw,于是查询ufw文档
http://wiki.ubuntu.org.cn/Ufw%E4%BD%BF%E7%94%A8%E6%8C%87%E5%8D%97
于是简单粗暴
ufw disable
在局域网另一台电脑上登录,一下子天朗气清,所有问题都解决了。
突然想起前几天配置ftp服务器失败,一定和 ufw有关,因为ftp服务器不只搭建一次了。
看来要好好熟悉一下ufw了
什么疑问,加老师微信进行咨询吧!
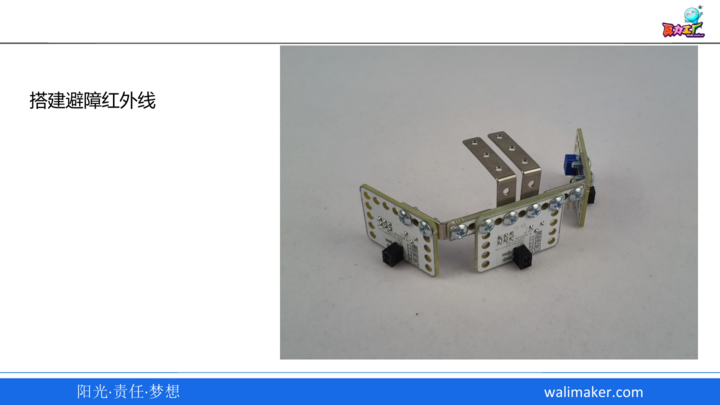
瓦力工程师接到一个新任务,就是设计出一套智能避障装置,然后研发出智能避障机器人,来装备到一家大型的综合餐厅,能给每位顾客送饭。

红外避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。
超声波其实就是声波的一种,因为频率高于20kHz,所以人耳听不见,并且指向性更强。
超声波测距的原理比红外线更加简单,因为声波遇到障碍物会反射,而声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离,如下图所示。
超声波测距相比红外测距,价格更加便宜,相应的感应速度和精度也逊色一些。同样,由于需要主动发射声波,所以对于太远的障碍物,精度也会随着声波的衰减而降低,此外,对于海绵等吸收声波的物体或者在大风干扰的情况下,超声波将无法工作。
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、停止、转弯、后退的控制方法
5.需要有避障系统。
电池盒、轮子、CPU、触碰开光、LED灯、红外避障传感器。
1.了解避障机器人工作原理
2.了解红外避障传感器的工作原理
3.搭建标准避障小车。




避障机器人完成了,有什么疑问,加老师微信进行咨询吧!
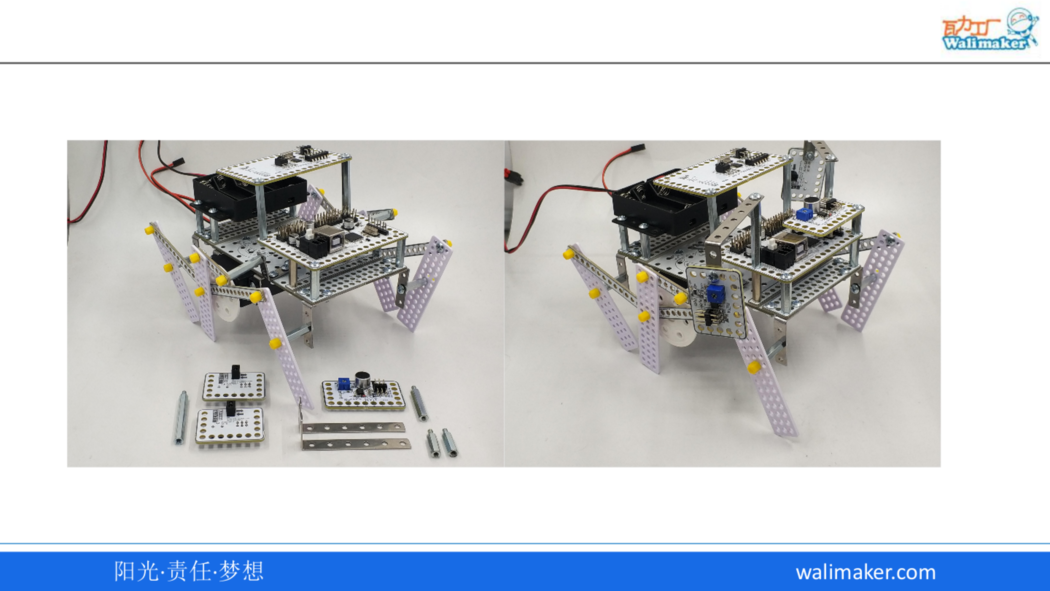
小瓦力来到一处神秘的宫殿,瓦力打开宫殿大门,刚走出一步,突然感到脚下的石头像一个开关一样咯地响了一声,然后抬头一看,一块石头从正上方掉了下来,看来有机关,危险。迅速后退。不能灵活躲避落石的机器人永远无法通过最后的机关,瓦力心里想到。怎么办呢?有了,用螳螂机器人带我过去。

螳螂是昆虫中体型偏大的,体长一般55到105毫米,非洲的螳螂是世界最
螳螂
螳螂(13张)
大的,身体流线型,以绿色,褐色为主,也具有花斑的种类;标志性特征是有两把“大刀”,即前肢,上有一排坚硬的锯齿,大刀钩末端长有攀爬的吸盘。头部呈扇形,较小;复眼突出,大而透亮,以黄绿色为主,晚上在灯光下呈现黑色,单眼,在两眼之间有3个小点即单眼;触角细长;颈部可180度转动;咀嚼式口器,上颚强劲。前足腿节和胫节有利刺,胫节镰刀状,常向腿节折叠,形成可以捕捉猎物的前足;前翅轻柔,遮住身体全部为覆翅,后翅比前翅要薄,边缘透明色,中间成放射状的紫红色、伸展开呈现扇状,休息时收敛和前翅相合;腹部肥大。前足锋利发达善于捕捉,中、后足适于步行,但有时前足也会用来保持平衡,发育呈变态发育。
红外避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。
超声波其实就是声波的一种,因为频率高于20kHz,所以人耳听不见,并且指向性更强。
1.需要外界能量提供动力
2.需要有轮子(为什么呢?观察生活)
3.需要有前进、后退、转弯的控制方法(不能手动)
电池盒、马达、轮子、CPU、红外避障传感器、附件
课程目标:
1.自然界的光线
2.红外传感器的原理
3.如果那么模块的使用










感应机器人已完成,有什么疑问,加老师微信进行咨询吧!
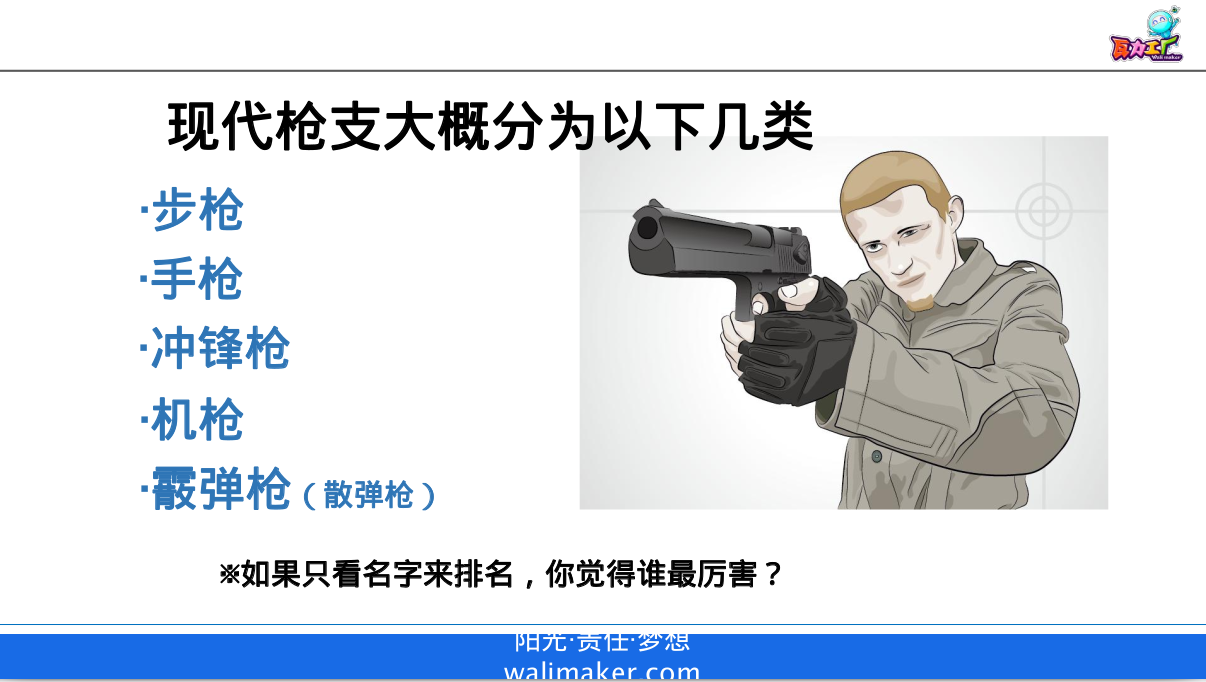
大家都看过战狼2吧,主人公冷锋(吴京 饰)遭遇人生滑铁卢,被“开除军籍”,本想漂泊一生的他,正当他打算这么做的时候,一场突如其来的意外打破了他的计划,突然被卷入了一场非洲国家叛乱,本可以安全撤离,却因无法忘记曾经为军人的使命,孤身犯险冲回沦陷区,带领身陷屠杀中的同胞和难民,展开生死逃亡。随着斗争的持续,体内的狼性逐渐复苏,最终孤身闯入战乱区域,为同胞而战斗。看完战狼2,你一定会为影片中林林总总的枪支而着迷,为影片中精彩绝伦的枪战而惊呼,现在咱们一起来做咱们的橡皮筋枪吧。






1.认识触碰开关。
2.能用如果那么控制语句进行编程。
3.进行橡皮筋枪的搭建。
如果机械能守恒的前提下有:机械能=势能+动能。
机械能守恒下,动能与势能之间可以完全的相互转化,且总量不变。
机械能是动能与势能的总和,这里的势能分为重力势能和弹性势能。我们把动能、重力势能和弹性势能统称为机械能。决定动能的是质量与速度;决定重力势能的是质量和高度;决定弹性势能的是劲度系数与形变量。机械能只是动能与势能的和。机械能是表示物体运动状态与高度的物理量。物体的动能和势能之间是可以转化的。在只有动能和势能相互转化的过程中,机械能的总量保持不变,即机械能是守恒的。
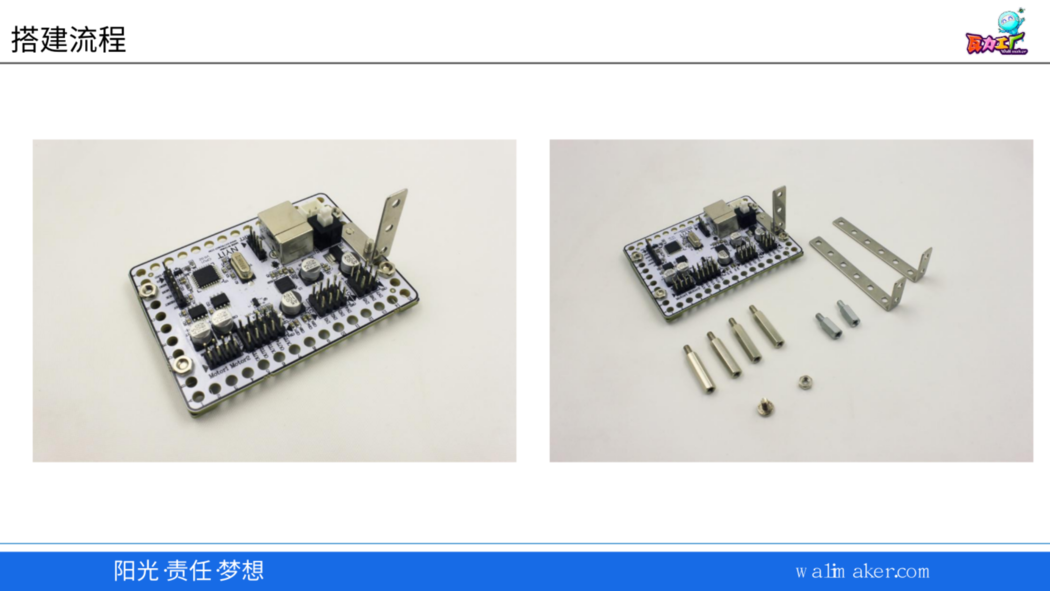
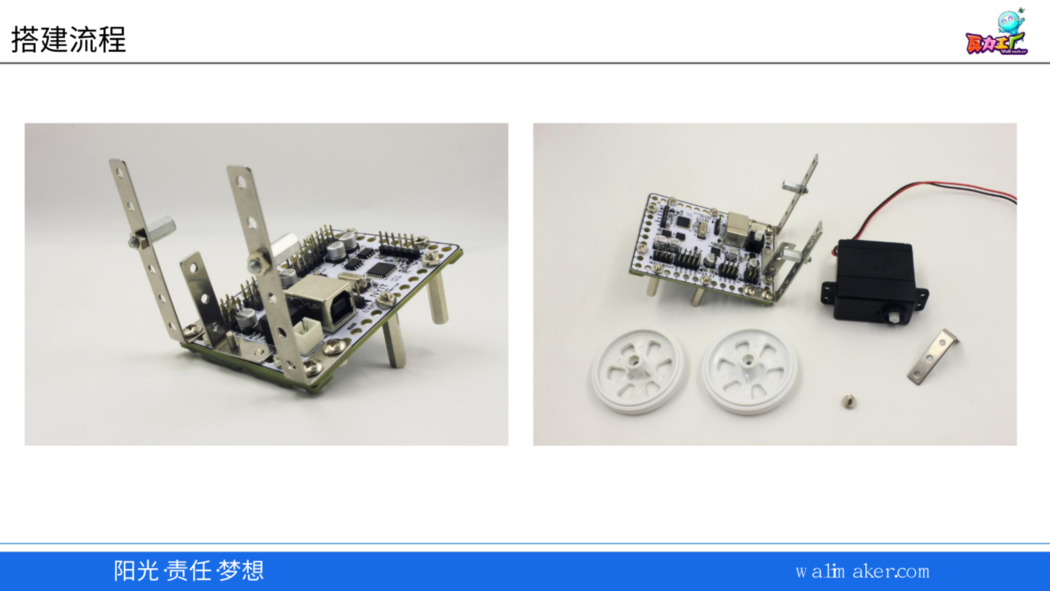
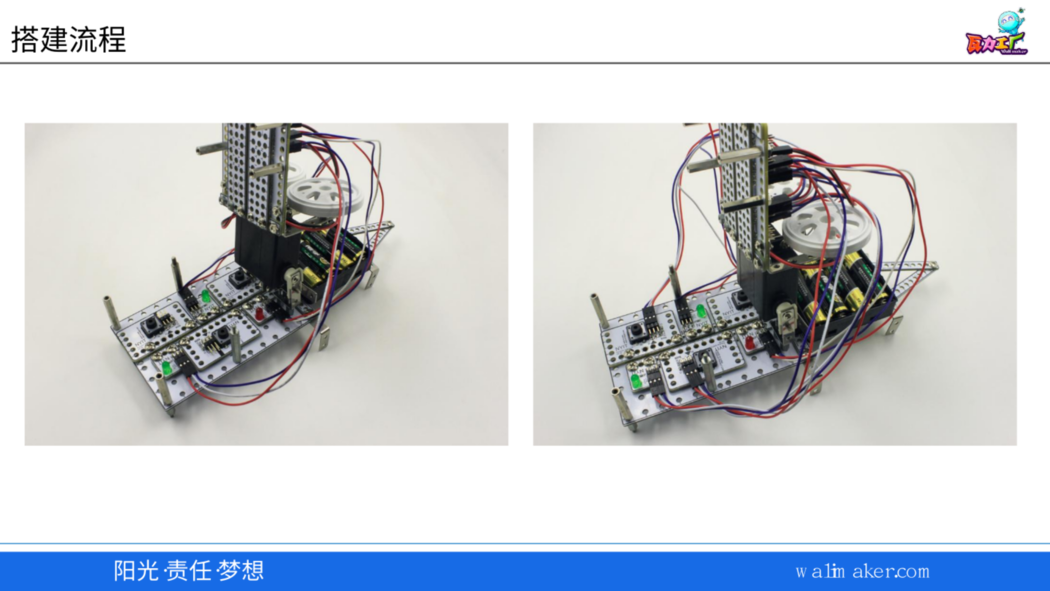
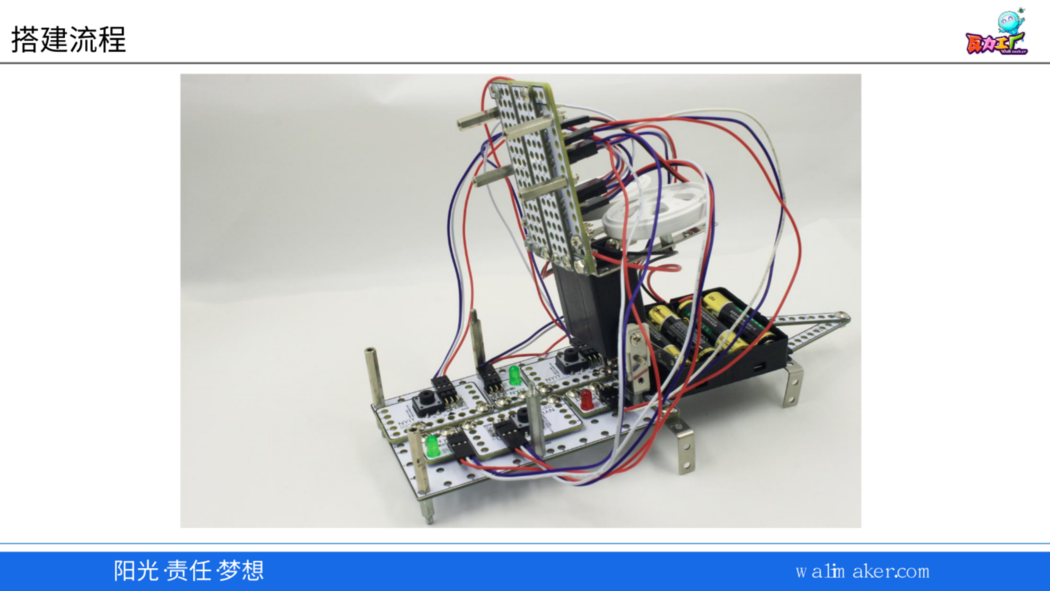
1.需要外界能量提供动力
2.需要有橡皮筋枪的发射系统
电池盒、CPU、触碰开关、马达




1.怎么提高橡皮筋枪的射程
2.你能给橡皮筋枪发射时加上响声吗?
橡皮筋枪完成了,有什么疑问,加老师微信进行咨询吧!