考试安排如下,详询瓦力工厂课程顾问!
探索
在制作糕点时,需要将蛋黄蛋清分开,并把蛋清搅拌至奶油状,这是一项浩大的工程,为此人们发明了打蛋器。图示为个手动打蛋器。
使用手动打蛋器时,需要人们一直往同一方向快速搅拌蛋液直到将蛋清搅拌至奶油状,相对于其他工具,手动搅拌器确实省了很大的力气,但搅拌需要快速长时间的操作手部依旧会感到很酸痛。
为了解决这个问题,人们想到可以加入加速齿轮组,这样手腕转动速度就可以减慢,以减轻手部负担。最终设计人员还加上了把手,将手动打蛋器升级成为了手摇式打蛋器。
在手摇式打蛋器中,我们加入了齿轮组,由大齿轮作为主动啮合小齿轮。当我们转动大齿轮一周,小齿轮却能转动好几周。从而搅拌叶转动几周,这样就不需要我们迅速的转动手腕也能将蛋清搅拌至奶油状。
制作
下面我们来制作打蛋器。
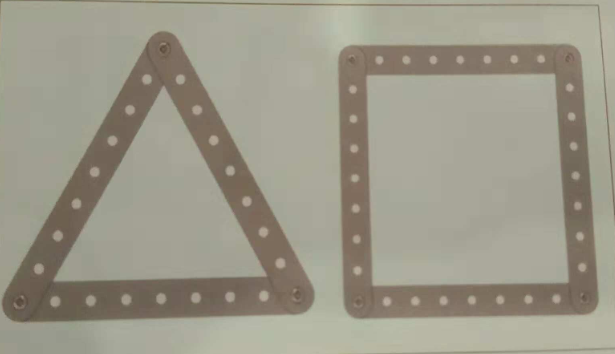
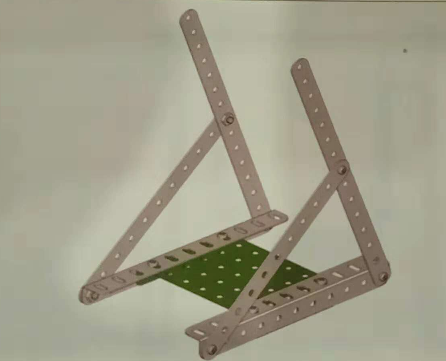
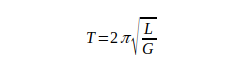
1.首先需要制作一个可以用来支撑轴齿轮组的框架。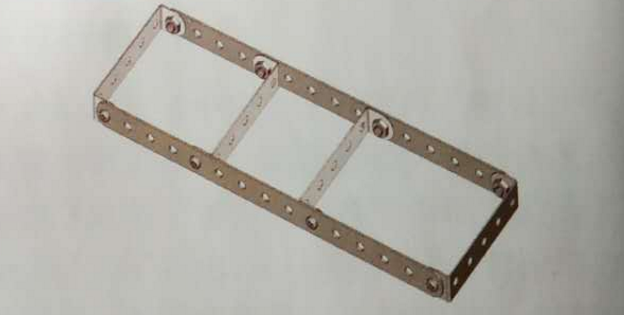
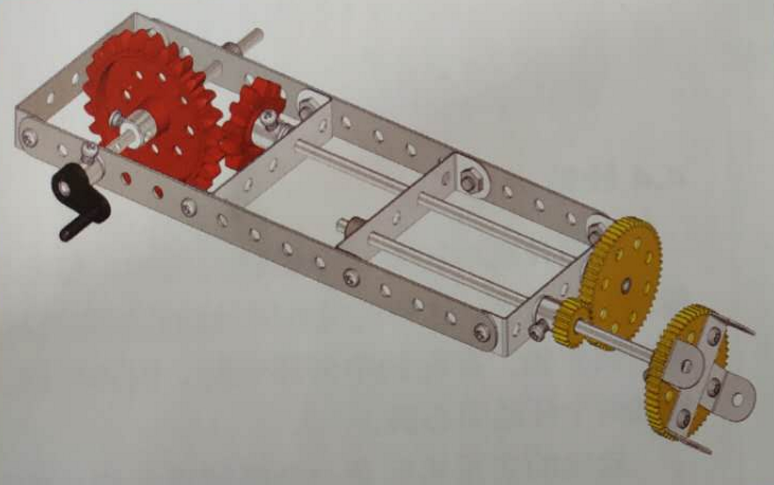
在框架上横着穿一根轴再竖着穿一根轴。横轴的中间安装一个大齿轮,而竖轴靠近横轴的一端装一个小齿轮,这个小齿轮要和横轴上的大齿轮咬合在一起,在竖轴的另一端再安装一个齿轮。另外,在横轴的一端装一个小把手,安装效果如图所示: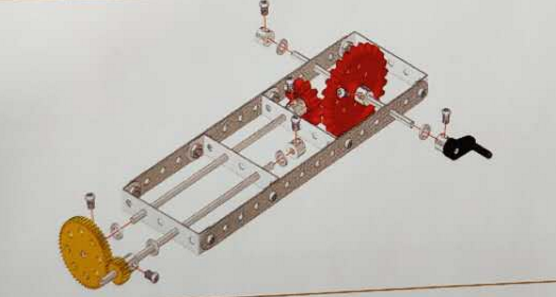
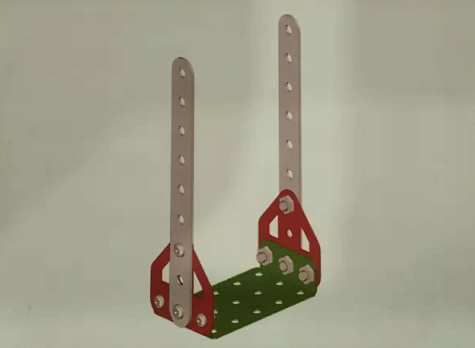
制作搅拌叶搅拌叶比较简单,找两个U型的或四个L型的叶片状零件即可。完成效果如图所示: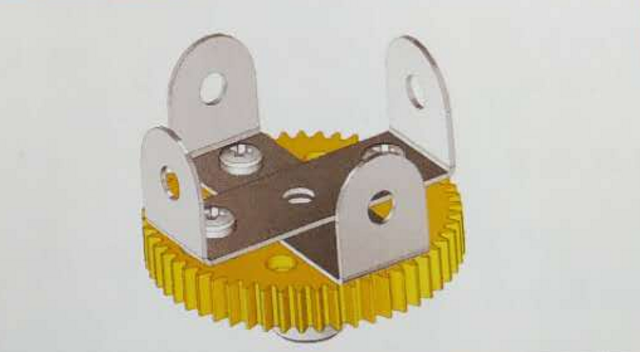
将做好的搅拌叶固定在一个轴的一端,同时在这个轴上再增加一个小齿轮,我们要在框架的这一端再制作一个加速的齿轮组。将安装了搅拌叶的轴插入框架当中,这里要注意要让两个齿轮啮合在一起,安装效果如图:
用我们的器材制作的搅拌器如下: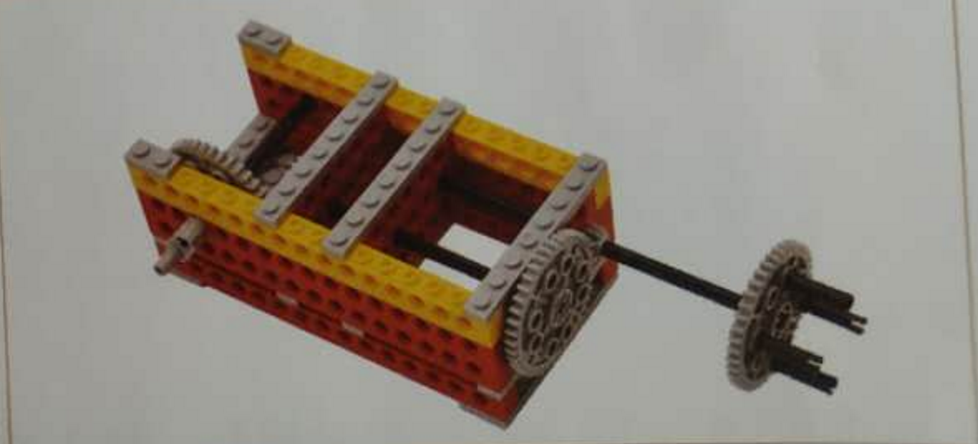
齿轮
齿轮是一种轮缘上有齿且能连续啮合传递运动和动力的机械零件。齿轮上每一个用于啮合的凸部分称为轮齿,一般叫作齿,这些凸起部分一般呈辐射状排列,配对齿轮上的轮齿互相接触可使齿轮持续啮合传动。
在齿轮的整个圆周上轮齿的总数称为齿数。
齿轮三要素:齿数、模数、压力角。
能够相互啮合的轮齿,必须是模数一样的,所以相互啮合的轮齿中直径大的齿数就会多一些直径小的齿数就会少一些,但齿轮在转动中转过的齿数是一样的,直径大的齿轮转动一周,直径小的齿轮就会转动好几周。所以直径大的齿轮带动直径小的齿轮转速会变快,被称为加速齿轮装置。
齿轮啮合时可以平行啮合也可以垂直啮合。图示齿轮组a是平行啮合对应是搅拌机中框架靠近叶片一端的两个齿轮,而齿轮组b是垂直啮合对应的是框架中横轴和竖轴交叉处的两个齿轮。
注意
1 | 注意平行啮合时齿轮转动的方向在同一平面上转动方向相反。垂直啮合时齿轮转动的方向,在垂直的两个平面上转动方向改变了而力的方向也改变了。 |
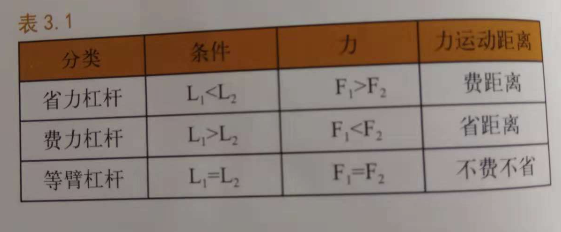
轮轴
在搅拌机中,还有一个轮轴的结构那就是横轴上的把手。这种能绕共同轴线,旋转的机械都叫轮轴。在轮轴中外环叫轮,内环叫轴,轮轴两个环是同心圆。
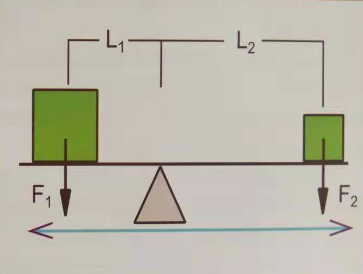
轮轴的实质实际是一个能够连续旋转的杠杆,这个杠杆的支点就在轴线上,轮轴在转动时轮轴有相同的转速,动力点就是轮的外圆。
动力臂就是把手到轴中心的距离而阻力点就是轴的外圆阻力臂就是轴的半径。所以当动力作用在轮上,轮轴为省力杠杆。轮和轴的半径相差越大,则越省力,但越费距离,动力作用在轴上则轮轴为费力杠杆,轮和轴的半径相差越大,则越费力,但越省距离。
齿轮种类
齿轮的种类多种多样按照外形分一般分为平齿轮、冠齿轮、和涡轮。
之前我们用到的都独属于平齿轮。下图所示的齿轮称为冠齿轮,冠齿轮的齿分布在端面,而不是在抡元上一般用在机械的变数。换向离合器上在玩具上也有广泛的应用。
而涡轮上的齿,看起来好像有点扁,并不是垂直于整个轮面的这是因为,涡轮,的用法,和平齿轮的用法不太一样,涡轮通常适合杆一起使用的,蜗轮蜗杆机构常用来传递两交错轴之间的运动和动力,涡杆上有螺丝上,相似的螺旋,螺丝上的螺旋转动的时候,会让罗斯进入,被固定件,而涡轮上的螺旋转动时会带动涡轮转动,涡轮。与我感在一起中间平面内有点像齿轮与齿条。
蜗轮蜗杆有一个其他齿轮组和布局贝的特点,我敢可以轻易转动涡轮单波轮无法转动,蜗杆这是因为蜗杆上的突脚很浅,当沃伦尝试旋转蜗杆时涡轮与蜗杆之间的摩擦力,让蜗杆保持原位。以实现运动的机械自锁。
有什么疑问,加老师微信进行咨询吧!
许昌市东城区智慧大道亨源通360广场3号楼7楼707室。
咨询:17698012211 15565323000